

Este Instructable se basa en parte en mi proyecto de Ciencias de secundaria año mayor "Poder de táctil: desafíos en diseño háptico detección y retroalimentación para nervios controlado Bionic/prótesis manos". Me quedé profundamente honrado cuando este proyecto fue seleccionado como finalista en el 2016 Intel Feria de Ciencias e ingeniería (ISEF, Phoenix, AZ). En ISEF este proyecto obtuvo el segundo lugar del Consejo Internacional en sistema Engineering (INCOSE). El proyecto también ganó el primer premio en ingeniería biomédica y mejor de la Feria de ciencia de los materiales en el estado de Virginia justo como grand Premio de ciencia en la Feria de Ciencias Regional Norte de Virginia. Estoy profundamente agradecido por esta oportunidad y a todos los participantes de Feria de ciencia compañero maravilloso, jueces y otras personas que he conocido a través de este proyecto.
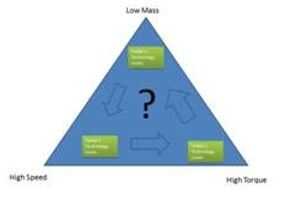
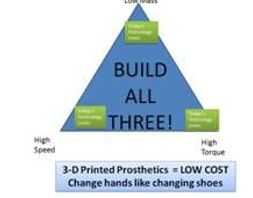
Concepto - en lugar de construir una sola mano que se ve obligada a transigir; aprovechar las ventajas de la impresión 3d bajo costo construir (al menos) tres manos que optimización parámetros clave de peso, la velocidad y la torsión.
Este Instructable se centrará sólo en la impresión en 3-d y la construcción de tres manos motorizadas. No cubre otras partes fundamentales del proyecto. Espero retroalimentación háptica (motores piezoeléctricos y estimulación nerviosa eléctrica transcutánea) y neurales (sensores mioeléctricos) oficios y diseño en un instructable más adelante cuando tiempo y horario permite.
Este proyecto pide prestado pesadamente de las múltiples fuentes en la comunidad de código abierto. Especialmente de Patrick S, tacto: Low Cost avanzada mano protésica
Gael Langevin robótica abierto InMoov http://inmoov.fr/ y AdvancerTechnologies Myoware sensor http://inmoov.fr/ así como muchos otros. Me gustaría decir "muchas gracias" a todos los que contribuyen a la comunidad open source. Quiero "pagar esto adelante". Contribuyendo para abrir fuente espero inspirar a otros para mejorar la calidad de vida por lo menos una. "ayudar a uno, ayudar a muchos"-Mick Ebeling
Video de diseño de cada dedo está conectado. El dedo de velocidad es especialmente impresionante (el video es en tiempo real).
1) ultralight de la mano - 191 gramos (manos mioeléctrico de comercial $7.000 van de 500 a 800 gramos. Estado de los usuarios que alta masa es una razón principal para no usar su prótesis) pasos 1-7 ilustran los pasos para construir un ultraligero de la mano con los servos SG90 controlados por un Arduino Uno. El costo total para partes era alrededor $32.
Próximos pasos - SG90 los servos son ligeros (9 gramos), rápido (60 grados en 0,1 seg), pequeño y bajo costo (~ $2,50). Lamentablemente con los engranajes de plástico muy pequeños son algo ruidoso y no muy resistente. Pueden buscar suplentes más durables y silenciosos. 2) mano alta velocidad - 0,06 segundos para abrir o cerrar un dedo pasos 8-10 construcción de la mano de alta velocidad alrededor de los 24 voltios Maxon RE13 motor del engranaje (diámetro de 13 milímetros, 29 gramos, $8). Controlado por un Arduino Uno + escudo del motor el costo total para partes era alrededor $70. 24 voltios el Maxon operan motores sin carga con los dedos cerca de su velocidad máxima de 480 rpm (revoluciones/seg 8). Una rotación de ~ 180 grados totalmente abre / cierra cada dedo en segundos de ~1/16 (~0.06). Esto es más leve más rápido que los dedos humanos promedio y alrededor de 80 veces más rápido que manos mioeléctricos disponibles que comienzan en ~ $7.000.
Resultados preliminares - los 24 voltios Maxon RE13 motores coreless son silenciosos, rápidos y parecen muy durable y confiable. Software para tomar ventaja de la velocidad de la mano de escritura sería un increíble proyecto siguiente. ¿Tal vez incluso software "macros" para jugar de acordes del violín, la guitarra o el piano? ¿O combinar con sensores incorporados para hacer una "mano inteligente" para la captura de velocidades manos normales no?
3) mano de par alta = agarre de gancho con un solo dedo = 20 kg (engranaje 3d impresa requiere cero poder de mantener en su lugar)
Pasos 11 y 12 ilustran los pasos para construir un engranaje de gusano basado en mano de alto esfuerzo de torsión alrededor de los 24 voltios Maxon RE13 motor del engranaje (diámetro de 13 milímetros, 29 gramos, $8). Controlado por un Arduino Uno + escudo del motor el costo total para partes era alrededor $70.
Fondo - mi objetivo es construir una mejor mano protésica. Pérdida de la mano es extremadamente devastador. El papel de la mano en la vida humana no se limita a los movimientos, pero es crítico para gestos, caricias, comunicación y la sensación. Lamentablemente se estima que uno de cada 200 personas en los Estados Unidos ha tenido una amputación y aproximadamente 135.000 cirugías de amputación ocurren anualmente. Mirando hacia el futuro, con aumento de los tipos de diabetes se espera que el número total de personas usando prótesis llega a 2,4 millones en 2020 (Dede).
Prótesis de hoy tienen gran margen de mejora. El costo de la más avanzada mano mioeléctrica desde alrededor de $7.000 y con accesorios pueden superar los $40.000. Y según encuestas recientes, el 20% de los usuarios abandonan sus manos muy costosos debido a peso (manos mioeléctrica comercial de hoy pesan típicamente > 500 gramos) y porque la mano es demasiado lenta. (Biddiss, Chau) (Pylatiuk).
Mediante la impresión de las manos rápidamente y a bajo costo, podemos voltear el paradigma del compromiso de diseño que está limitando actualmente prótesis. En vez de compromiso, imprimir múltiples diseños diferentes que se han optimizado para cada aplicación. ¿Jugar frisbee? Utilizar una mano de alta velocidad. ¿Cultivar un huerto? Cambie a una mano de alto esfuerzo de torsión. Trabajar todo el día alrededor de la oficina. Use una mano ultraligera. Podrían hacer diseños con manos múltiples y múltiples herramientas especializadas. Integración de herramientas de chef, cuchillo del cirujano o cinceles de un artista y cepillos podría convertirse en la nueva realidad.
Para saber que empecé por impresión InMoov de Gael Langevin mano http://inmoov.fr/ en mi impresora 3D Lulzbot Mini en ABS. La mano de InMoov es brillantemente simple y relativamente simples y fáciles de imprimir. Con servocontrol de arduino la programación es relativamente fácil de aprender. Lamentablemente (para el uso como prótesis) el diseño usos servos en el antebrazo (difícil de integrar con el brazo) y tendones (alta fricción) pasando por la muñeca, la palma y los dedos. Langevin Gael ha trabajado en este problema http://inmoov.fr/ pero un diseño final no está listo para ser lanzado.
A continuación Patrick S, diseño de la mano de tacto: bajo costo avanzado prótesis mano el tacto es increíble! Las instrucciones son completos y fáciles de seguir. El diseño de /linkage conjunta 2 dedo de tacto es fácil de imprimir y funciona realmente bien. Hubo sin embargo dos áreas que pensé que podrían mejorarse. Aunque menor, la mano de tacto recomienda el CESPAP 16 Coreless motorreductor. En 16 milímetros y ~ 39 gramos este motor Escap es ligeramente más grande y más pesado que el deseado. El actuador es un alambre de acero (tendón) que está diseñado para envolver alrededor de un cilindro de impresión 3-d para tirar en el dedo. Lamentablemente me encontré con el ciclo de vida de estos cables eran a menudo corto. Con el tiempo el cable del actuador (tendón) tendía a fatiga y falla. (Esta falla puede deberse a que estos actuadores del edificio incorrectamente?)
")












