Paso 33: Fichas en el tablero!
El microcontrolador Picaxe 28 X 1 que tienes aquí y el Consejo, es un paquete pequeño bastante sorprendente y muy potente.
Recuerdo lo sorprendido que estaba que pude realmente hacer este todo lo que pude imaginar, que espero que obtendrá esa sensación en algún momento; control de En serio, usted puede hacer esta cosa hacer a todo tipo de cosas con todo tipo de aparatos electrónicos que tienes en tu casa. Incluso si no sabes nada de nada, y la electrónica es tan extraña como lo es para mí.
Usted puede también hacer que manejar tus servos, motores, cálculos, control distancia... todo lo que un robot necesita. Y eso es lo que vamos a establecer por ahora
El microcontrolador es el chip de largo. Es un programa, y luego hay entradas y salidas en el tablero que puede usar.
Echa un vistazo a esta página: 28 pin Junta de proyecto (AXE020), Picaxe para dummies
Ahora, no espero a leer que la página ahora, porque he prometido que se llega a construir el robot más rápido posible :) Sin embargo, es importante que lea esa página en algún momento, para aprender sobre el tablero y el microcontrolador. Me prometas regresar a eso, hacer un marcador ;)
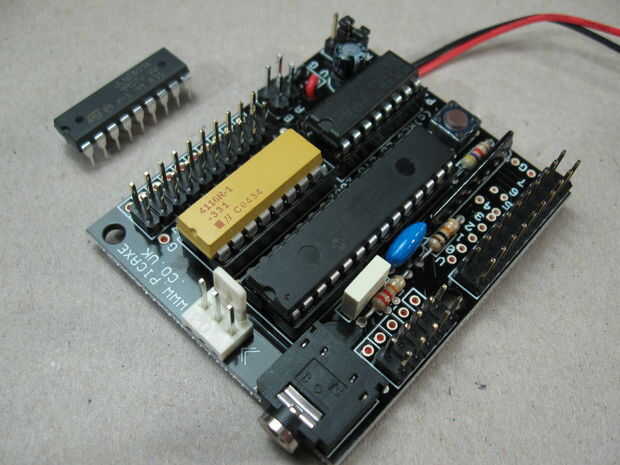
OK, suficiente charla, inserte el chip negro, el microcontrolador, asegúrese de girar a la manera correcta: tiene una marca en un extremo, y lo mismo ocurre con la toma de corriente. Debe emparejar.
Ahora, cuando usted compró la Junta, ya debe tener un chip negro en él, en la ranura donde he colocado el chip amarillo en la imagen siguiente.
Tome el chip negro y como lo hice, reemplazarlo por el amarillo. Tiene no suficiente pernos, pero véase el cuadro para qué fin dejar abierta.
El chip amarillo está sentado entre el microcontrolador y la fila superior de los pernos en la fotografía. Esa fila tiene, como ustedes saben cuando usted lee sobre el tablero, el marcador, recuerde que las salidas. Vamos a conectar el servo a uno de ellos. Servos están enviando un montón de ruido eléctrico en la línea. El chip amarillo es una serie de resistencias de 330 ohmios, que reducirá la cantidad de ruido que es sendt hacia el microcontrolador. Es simplemente las líneas rectas, con cierta resistencia entre, haciendo las señales viajan ambas maneras un poco más débiles. Por lo que está ahí para proteger el microcontrolador. Francamente, nunca he oído de nadie freír un microcontrolador debido a ruido del servo, pero como manuales nos dice que hacer esto, y la Junta Directiva está preparada para él, podría así.
También he escuchado versiones negras de este chip. Qué aburrido, pero no obstante y sí; Se puede utilizar, no importa el color, si tiene la misma funcionalidad.
El chip negro que estaba en ella tiene lugar, es un supuesto Darlington-thingey! Si usted necesita más que eso, por favor, lea los manuales :) Pero es un buen chip, si no utilizas servos; Están magnificando las señales, así que por ejemplo puede conectar un altavoz derecho sobre él (donde estamos ahora estará poniendo un servo) - y utiliza el comando "sonido", se puede hacer un pitido bastante fuerte, melodías etc. del juego. Tienes tratar así! No ahora ;) Desventaja de utilizar el microcontrolador y este tablero para todo, es que cuando quieres jugar con servos, tome el Darlington, y la diversión que proporciona. Pero hay más, esperar y ver!
Último chip es el controlador del motor, tiro así!
Cuando el microcontrolador se coloca en su tablero, se puede cambiar de encendido/apagado. Usted podría utilizar para motores. Sin embargo, motores "rugosas" y podrían freír las salidas de microcontroladores. Y otra cosa es que si el microcontrolador sólo puede activar el encendido y apagado, entonces... ¿Cómo conduces hacia atrás?
Un conductor del motor se encarga de todo esto;
Este pequeño motor-controlador-en-un-chip puede manejar un par de pequeños motores (600 mAh cada una, para la tecnología interesada), sin freír el microcontrolador. Y además; Puede hacer que los motores van hacia atrás. Que es útil cuando frente a una pared :)
El tablero agradable tiene un lugar para un controlador de motor que puede tomar un par de pequeños motores y hacerlos conducir tanto adelante y atrás.
La Junta se establece, por lo que de la salida de microcontroladores 4, 5, 6 y 7 se introducen en el controlador del motor y hacia fuera viene 2 pares finas de líneas que puede enganchar un par de motores a; El Motor A y el Motor B. Y usted sólo soldar pernos en ellos, qué bonito.
Sugerencia: Nuevos chips en
Nuevo y sin usar chips suelen tienen dos filas de patas un poco demasiado separadas. Tan suavemente empuje hacia abajo el lado del chip hacia una mesa para corregirlo, antes de insertar en una ranura. Me entenderás una vez que se intenta establecer un nuevo chip en un zócalo ;)
Consejo: Antiguos chips hacia fuera
Es fácil de recibir las fichas de las tomas, insertando un destornillador plano por debajo de ella, empujarlo bajo, hasta el final y empuje suavemente hacia arriba.
Hecho: Más tarde en su vida, solo desea el microcontrolador a ser sólo un microcontrolador. Luego comprar extra otros consejos para algo como control de servo y el control del motor. Estas placas tendrán sus comandos desde el microcontrolador. Y luego tu robot puede hacer todo mucho más de gran alcance y al mismo tiempo. Sin embargo, es bastante increíble lo puede hacer esta configuración hace, como lo tienes aquí! Muchos, muchos robots cool y otro proyecto uso lejos más simple o sólo este configuración.
")




")







