Paso 3: Amarre el desglose para el Arduino
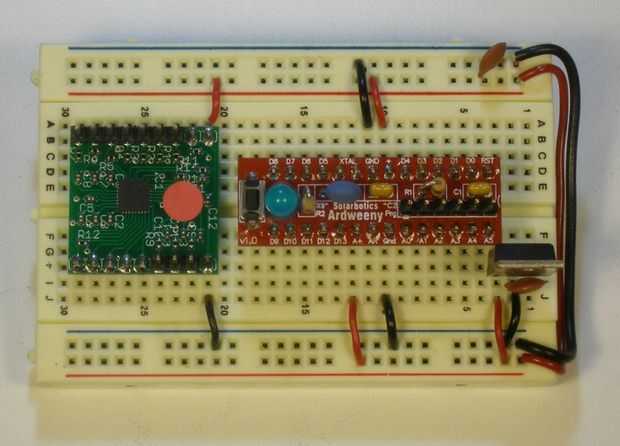
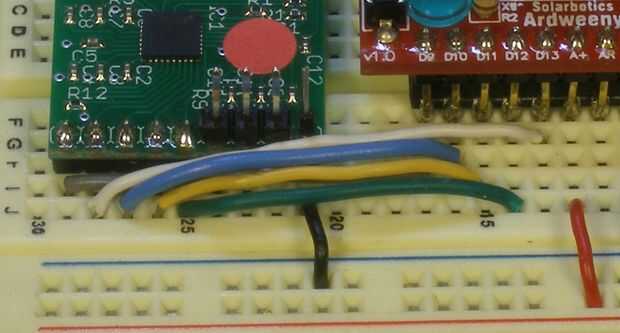
Estas son las conexiones de pasador que necesitamos hacer para SPI:
- PIN nombre Breakout Arduino
- SCLK 11 Digital 13
- SS 12 10 Digital
- MOSI 13 Digital 11
- MISO 14 12 Digital
También hay dos pines utilizados para algo que se llama 'Handshaking' donde cada dispositivo confirma que ya están listos para comunicarse. Las conexiones de pin son:
- PIN nombre Breakout Arduino
- DRDY 10 9 Digital
- CHNG 2 8 Digital
Cuando el QT1106 decide que ha ocurrido un evento de sentido (movimiento touch, lanzamiento o deslizante), establece el pin CHNG alta. Esto indica el Arduino que debe pedir nuevos datos clave y regulador a través de la interfaz SPI. Cuando Arduino comienza el SPI, primero tiene que esperar a que el perno DRDY ir alto, de lo contrario, que el QT1106 se perderá todo o parte de la comunicación. TODO ESTO ESTÁ CUIDADO EN LA BIBLIOTECA! LA BIBLIOTECA TRABAJA DURO... POR LO TANTO NO DEBES!
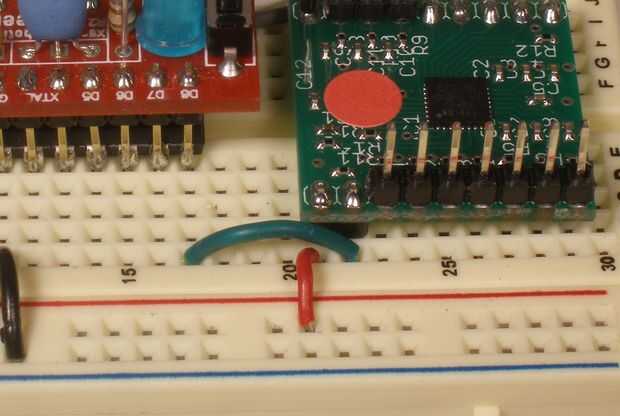
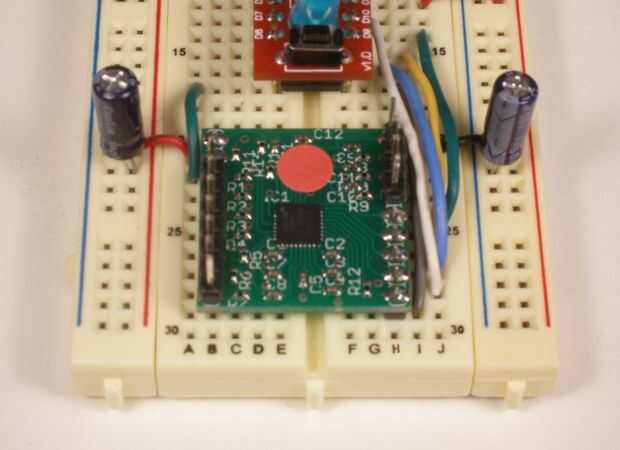
Lo último que tienes que hacer es soltar un par de tapas a través de los rieles. Estas son fuente de alimentación acondicionado condensadores, y deben colocarse al lado el desbloqueo + pernos V y GND. Estoy usando 1uF pero 2.2uF funcionará igual de bien. Si no tienes estos en su lugar, el sensor ir a un poco loco y escupir un montón de ruido y toque falsas señales!





")




