Paso 5:.: Spin Spin Motor:. (Transistor y Motor) - CIRC03



Lo que estamos haciendo:
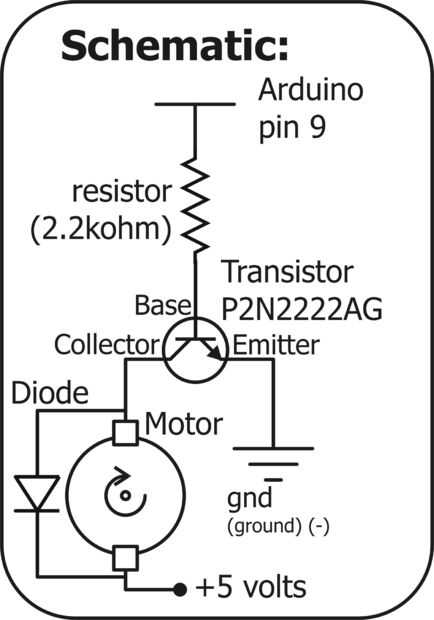
Pines de Arduino son ideales para controlar directamente artículos eléctricos pequeños como LEDs. Sin embargo, cuando se trata con objetos grandes (como un motor de juguete o una lavadora), un transistor externo es necesario. Un transistor es increíblemente útil. Cambia mucho de la corriente utilizando una corriente mucho más pequeña. Un transistor tiene 3 pines. Para un transistor de tipo negativo (NPN) conectar la carga al colector y el emisor a tierra. Cuando fluye una pequeña corriente de base para el emisor una corriente fluirá a través del transistor y hacer girar el motor (esto sucede cuando nuestro pin Arduino alta). Hay literalmente miles de diferentes tipos de transistores, lo que permite cada situación ser perfectamente. Hemos elegido un P2N2222AG un transistor de propósito general más bien común. Los factores importantes en nuestro caso es que su voltaje máximo (v 40) y su corriente máxima (600 miliamperios) están lo suficientemente alta para nuestro motor del juguete (los detalles completos pueden encontrarse en su hoja de datos http://tinyurl.com/o2cm93 )
Nota: el transistor que utilizamos tiene un orden en: pinout de Base colector emisor (a diferencia de algunos otros transistores popular)
(El diodo 1N4001 actúa como un diodo flyback para más detalles sobre por qué su allí visite: http://tinyurl.com/b559mx)
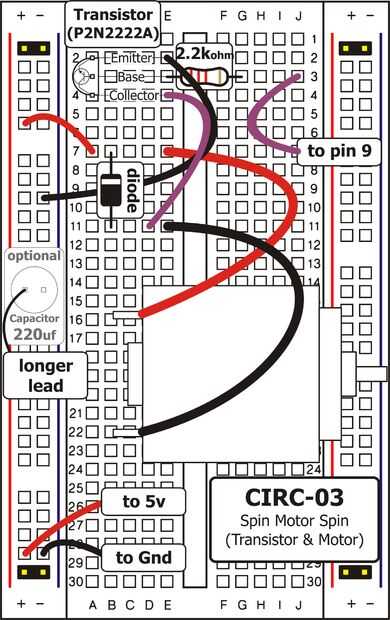
(también puede descargar la hoja de diseño del tablero de la parte inferior de este paso)
Las partes:
- Hoja de protoboard CIRC-03
- Jefe del pin 2 (x4)
- Transistor (P2N2222AG) (TO92) (x1)
- 2.2 k ohmios resistencia (rojo-rojo-rojo) (x1)
- Motor del juguete (x1)
- Diodos (1N4001) (x 1)
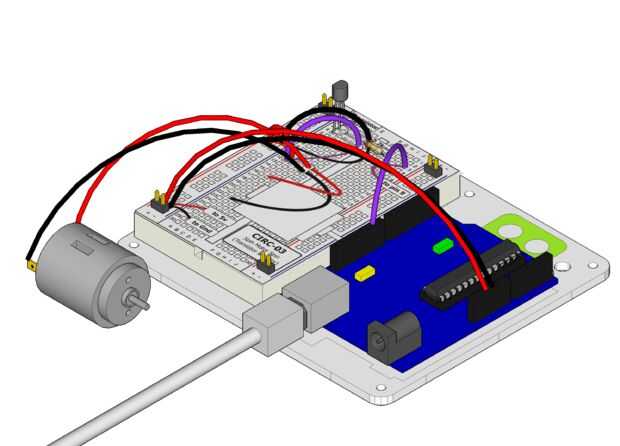
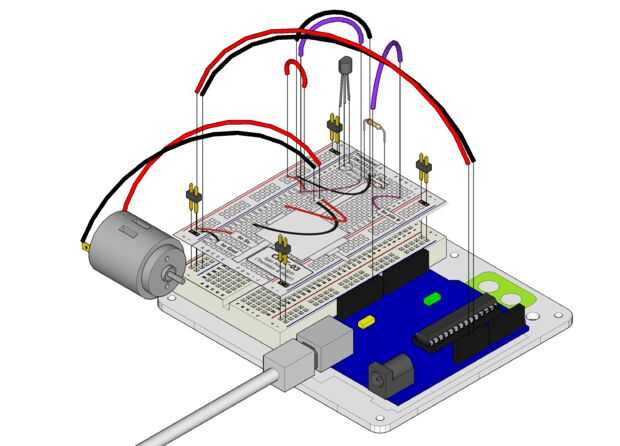
El circuito y conectar todo:
Un pequeño Video de todo lo que está enchufado
El código: - http://tinyurl.com/dagyrb
¿No funciona?
- Motor no gira? -Si usted origen su propio transistor, doble control con la hoja de datos que el pinout es compatible con un P2N2222A (muchos se invierten)
- No aún suerte? -Si usted de origen su propio motor, comprobar que se trabajan con 5 voltios y no dibuja demasiado poder.
- Todavía no trabajo? -A veces la placa Arduino se desconecte del ordenador. Prueba sin conectar y luego vuelva a enchufarlo en el puerto USB.
Lo que es mejor:
Control de velocidad:
Jugamos con la capacidad de Arduino para controlar el brillo de un LED antes, ahora usaremos la misma característica para controlar la velocidad de nuestro motor. El arduino hace esto usando algo llamado modulación de anchura de pulso (PWM). Esto se basa en la capacidad de Arduino a funcionar realmente rápido. En lugar de controlar directamente la tensión que viene del pin Arduino cambiará el pin encendido y apagado muy rápidamente. En el mundo de la informática que esto va de 0 a 5 voltios muchas veces por segundo, pero en el mundo de los humanos lo vemos como un voltaje. Por ejemplo si el Arduino es PWM'ing 50% vemos que la luz atenuada 50% porque nuestros ojos no son lo suficientemente rápidos como verlo parpadea el encendido y apagado. El mismo funciona con transistores. ¿No me creen? Probar.
En la sección loop() cambiarlo a este
Continuación, cargue el programa. Puede cambiar las velocidades por cambio de variables onSpeed y offSpeed
Aceleración y desaceleración:
Por qué parar en dos velocidades, por qué no acelerar y desacelerar el motor. Para hacer esto simplemente cambiar el código loop() leer
Luego subo el programa y ver como su motor acelera lentamente velocidad máxima entonces retrasa otra vez. Si desea cambiar la velocidad de la aceleración cambia la variable delayTime (el más grande significa un tiempo de aceleración)









 - Tutorial de Arduino")



