Paso 6: Cableado un puente H y manejar motores
Así que para esta próxima etapa se va a utilizar un puente H. Aunque no espero que comprendas lo, quisiera consultar sobre la documentación para el puente H para saber qué especificaciones hojas para componentes electrónicos parecen. Si alguna vez vienes a través de un componente con que su familiarizado con usted debe ser capaz google la hoja de especificaciones para luego número inscriben en él.
http://www.ti.com/lit/DS/symlink/sn754410.pdf
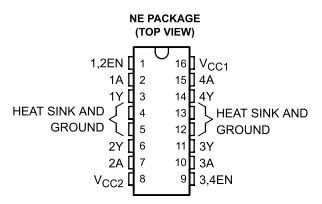
El puente H SN7544 tiene 16 pernos y las clavijas están marcadas 1 a 16 dentro de la caja que representa el chip. Este chip es capaz de alimentar los dos motores. Uno está conectado a la mitad izquierda del chip el otro en la mitad derecha del chip. Ahora a describir lo que hace cada pin.
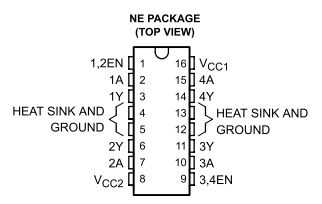
1.) esta es la línea de activar para el motor 1. Cuando esta es alta, 5 voltios. El motor se puede conducir. Cuando es baja, 0 voltios el motor no funcionará. Esto puede utilizarse con una señal PWM (conoceremos más adelante) para controlar la velocidad del motor girando encendido y apagado muy rápido.
2.) es una línea de control para el motor 1. Utilizas esto con pin 7 para controlar la dirección que el motor gira 1. Si el pin 2 se encuentra alta y el pin 6 se encuentra baja. El motor hará girar una forma. Si le da la vuelta les pin 6 es alto y pin 2 es baja el motor cambiará de dirección. En todos los demás Estados no gira el motor.
3.) este pin recibe por cable a un lado del Motor 1. Al otro lado del Motor 1 es conectado al pin 6
4.) esto va para el carril de tierra, 0 voltios. Aquí es donde la energía de las salidas del motor.
5.) igual a 4
6.) este pin recibe por cable al otro lado del Motor 1.
7.) esta es la otra línea de control para el motor 1.
8.) esta clavija necesita 5 voltios para el chip funcionar correctamente. Esto alimenta el chip
9.) esta es la línea de activar motor 2.
10.) es una línea de control para Motor de 2.
11.) esto es se pone a un lado del Motor 2. Al otro lado del Motor 2 es conectado al pin 14
12.) igual a 4
13.) igual a 4
14.) esto es por cable al otro lado del motor 2.
15.) esta es la otra línea de control para el motor 2.
16.) esta es la fuente de alimentación para el motor 1 y motor 2. Para este ejemplo recomiendo una batería de 9 voltios.
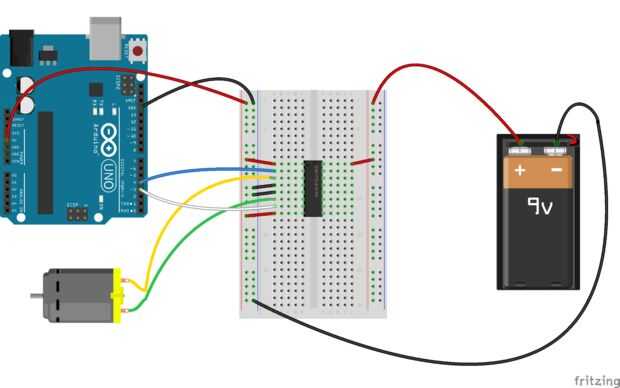
Ahora para el cableado para arriba!
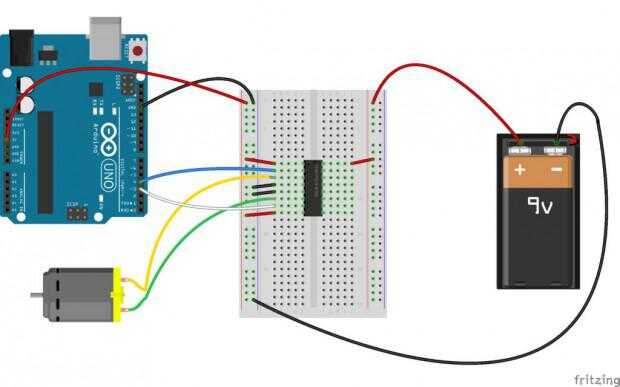
Mira el diagrama de fritzing. Par de cosas claves tener en cuenta. Asegúrese de conectar el GND (0 voltios) de Arduino con el - de la batería (0 voltios). Y no conectar los 5V de Arduino con el + de la batería (9 voltios). Esto perjudicará su Arduino.
Después de cableado abrir _1Motor y ejecutarlo.
Reto: Conecte el motor con el interruptor para que cuando apreté gira en una dirección y lo lanzó giros en la dirección opuesta.
Solución: _1MotorWithSwitch
Desafío: Hacer un interruptor hace el motor de la vuelta en la dirección de una. El otro interruptor lo hace girar en la dirección opuesta. No hay interruptores hacen parada.
Sugerencia: Puede que necesite conocer el operador "y" pues tu si declaración.
Solución: _1MotorTwoSwitches
Reto: Conectar el segundo Motor y hacer algo interesante con él.
Nota: Si quieres empezar a recorrer todo lo que necesita es algunas ruedas que se puede comprar aquí https://solarbotics.com/product/gmpw/ o hacer tu propia fuera de las tapas de tarro y bandas de goma.





 - Tutorial de Arduino")
")






")