

Cuando vi la Harvard Robot suave ondulación alrededor me impresionaron en la simplicidad de la actuación. Me ha gustado cómo las piernas extendió nuevamente con su propia elasticidad. Me pregunté si la idea podría ampliarse para sistemas esqueléticos.
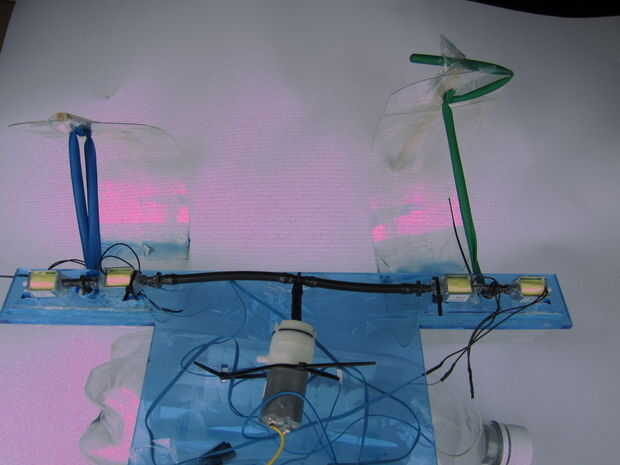
Decidí hacer estos súper barato, actuadores de tipo pull de globos twisty. Si bien todavía hay algunas preguntas de control y relajación de la tensión, estos actuadores trabajan al menos en pequeña escala. En teoría, tienen una mayor longitud de movimiento de los músculos de aire o cilindros neumáticos.
Fue divertido ver a los profesores de tecnología en Robogames interesados en la construcción para sus clases. Si ya tienes un Arduino y fuente de alimentación el sistema actuador todo puede hacerse por menos de $50.
You'll need (what I used)
Arduino u otro microcontrolador Arduino Uno
Transistores NPN (2 x por el actuador, 1 x por bomba) TIP29C (con límite de corriente de 1A)
Micro-solenoide válvulas (dos por brazo) AJK-F0504 aunque yo pude has usado Jameco el uno
Pequeña bomba de AJK-B2703 aunque Ponoko tiene una
Material plástico Flexible (PETG) de la pierna o una primavera enemistarse (otro globo)
Marco acrílico de 5,6 mm aunque puede utilizar thinner
puede solicitar mi estructura y patas de Ponoko.com
tubo flexible, con tees de púas y Home Depot (ver fotos)
Alta corriente 7v de alimentación o pilas
Globos twisty
Abrazaderas de plástico
Pequeño protoboard o escudo de prototipos
Soldadura de hierro
Pegamento caliente del derretimiento
Cable de calibre delgado
Termocontraíbles o cinta aislante













