Paso 10:: terminando y el código de Arduino

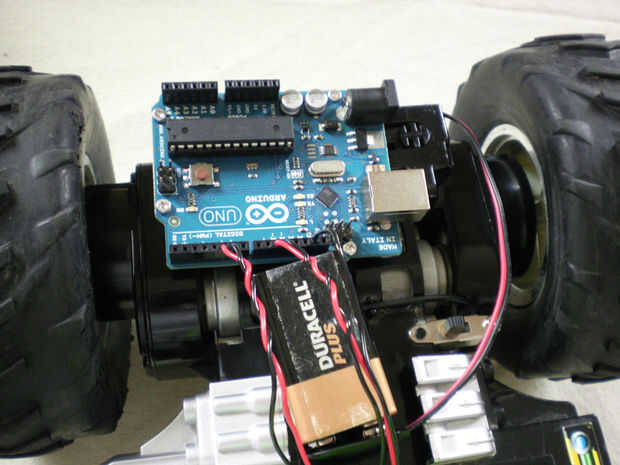

Me he pegado mi arduino y la batería de mi v9 en el chasis básico de la plataforma del robot hasta que he terminado haciendo un marco para los componentes del chasis (Arduino, protoboard y poder)
Ahora en el código de arduino, este es sólo el código de prueba, pero debe ser una buena base para comenzar su propio proyecto.
/*
Software de demostración de Arduino
Conectar Arduino Serial Monitor o HyperTerminal
y se puede controlar el robot a través de las teclas de W.A.S.D..
Cualquier otra tecla detendrá tu robot en sus viajes.Este ejemplo de código es de dominio público.
*/
void setup(void) {}
Serial.Begin(9600);
}
void loop(void) {}
mientras que (Serial.available() < 1) {} / / esperar a que se recibe un carácter
char val = Serial.read();
Switch(Val) {/ / realizar alguna acción dependiendo el comando
caso 'w': / / avanzar
Forward();
rotura;de caso ': / / mover hacia atrás
REVERSE();
rotura;caso 'a': / / girar a la izquierda
Left();
rotura;caso sería ': / / girar a la derecha
Right();
rotura;por defecto:
halt();
rotura;
}
}
{} void forward()
Serial.println("forward");
analogWrite (11, 100);
analogWrite (6, 100);
}{} void reverse()
Serial.println("REVERSE");
analogWrite (10, 100);
analogWrite (5, 100);
}{} void halt()
Serial.println("Stopped");
digitalWrite (11, bajo);
digitalWrite (10, bajo);
digitalWrite (6, bajo);
digitalWrite (5, bajo);
}left() vacío {}
Serial.println("left");
digitalWrite (10, HIGH);
digitalWrite (6, alto);
}
right() vacío {}
Serial.println("Right");
digitalWrite (11, alto);
digitalWrite (5, alto);
}
Aquí hay un video del robot en acción (pido disculpas por la calidad del video)
 Básicos Arduino Robot buscador de luz!")










 :-)")
