Paso 2: Comenzar a construir desde

Su para arriba-a usted cómo cómo diseñar la estructura física del Robot por lo tanto, no voy a habla sobre más detalles. Voy a discutirle sobre la parte técnica en paso a paso. Su realmente aburrido que ya conoce Edision Board de Intel pero útil para los que están en nivel principiante.
Si usted ya tiene Junta de Edision de Intel está bien para empezar pero si no tiene o si acaba de traer o plan para comprarlo y luego siga las instrucciones en el sitio web de Intel Edision conectarlo a la placa Arduino de breakout y a flash usando herramientas flashes del teléfono Intel también echa un vistazo cómo usar ssh conexión mediante Wi-Fi o puerto serie. Antes de comenzar a construir este proyecto, si es posible, basta una mirada cómo realizar la programación en él mediante el lenguaje de programación diferente. En este proyecto utilicé python programación y materias de HTML para la construcción de la interfaz web para el robot.
Compruebe el Motor
Uso de la batería para comprobar el motor de Rover 5 Asegúrese de que funciona perfectamente.
Compruebe la Webcam usando su PC o portátil.
Ahora su tiempo para hacer algunas materias de programación.
El escudo de Arduino conectarse breakout Junta (véase la foto).
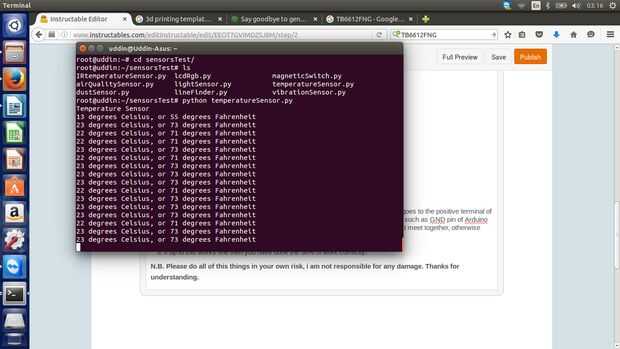
- Conecte el sensor de temperatura al puerto A0 de escudo base, recuerda estoy usando el sensor de temperatura del grove y escudo base de grove y ejecutar el temperatureSensor.py y compruebe el salida o resultado y luego retire el sensor de la pantalla.
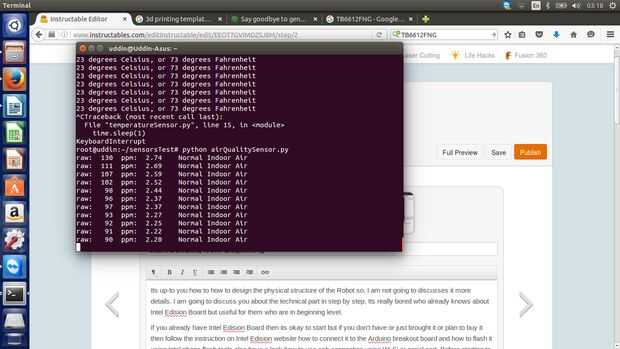
- Conecte el sensor de calidad del aire al puerto A0 del escudo base y ejecutar el airQualitySensor.py y observar el resultado entonces desmonte el sensor de la pantalla base.
- Si desea añadir más sensores en su robot, solo añadirlo.
- He añado otro sensor MQ-9 que no es un sensor de arboleda, para que conecte al pin A3 con el cable. otros dos alambres va a VCC y GND.
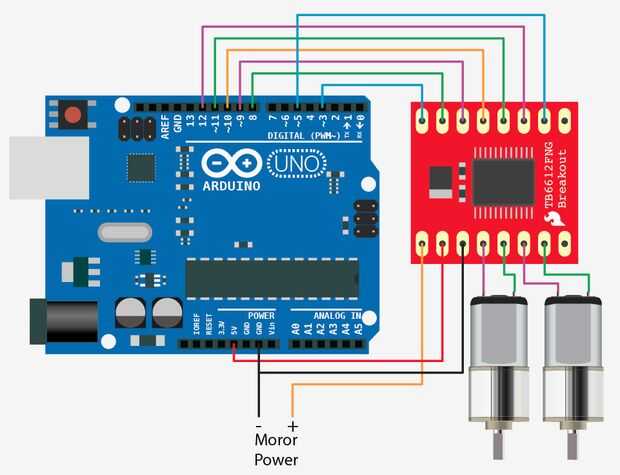
- Ahora tiempo para jugar con el conductor del Motor, un poco más complejo. Conecte el conductor del motor a la Base sheid con Gabes según el diagrama de cableado (ver la foto y sigue las instrucciones)
VM se conecte al powersource externo en + terminal VE
VCC va a 5V de arduino pin (escudo base)
GND va al pin GND de la placa Arduino o escudo base
GND va al terminal GND de batería externa (tiene 3 pines GND)
GND va al terminal GND del Arduino shield tablero o base
A01 va a uno de los pines del Motor_01
A02 va al otro pin de Motor_01
B01 va a uno de los pines del Motor_02
B02 va al otro pin de Motor_02
PWMB va al pin 5 de la placa Arduino
PWMA va al pin 3 de la placa Arduino
STBY va al pin 10 del Arduino Board
AIN2 va al Pin 8
AIN1 va al pin 9
BIN1 va al pin 11
BIN2 va al pin 12
- Recuerde que, encendido el motor usando fuentes de energía externa (pin de la VM va al borne positivo de la fuente de alimentación externa. Recuerde que, toda la tierra debo comunes tales como pin GND de Arduino y GND pin del controlador del Motor y el terminal GND de la fuente de alimentación externa debe cumplir juntos, lo contrario puede ser motor hace que no se mueve.
- Ahora, ejecute el testMotor.py y ver algunos estúpidos móviles del robot.
- Si hasta esta trabaja bien entonces lo has hecho correctamente el 50% del trabajo.
NOTA: Por favor hacer todas esta cosas en su propio riesgo, yo no soy responsable de cualquier daño. Gracias por la comprensión.
")












