Paso 10: Control y problemas del puente H

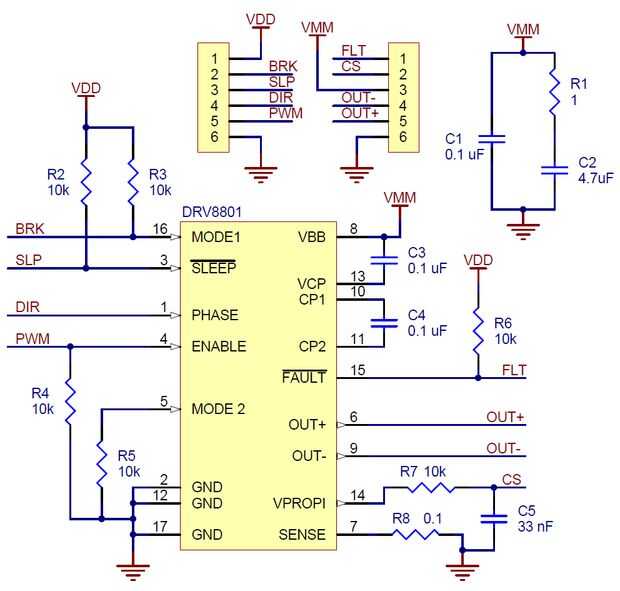
Para el control de velocidad y dirección del robot, he utilizado tarjetas chip había hecho DRV8801 . Tengo algunos L298 controladores están bien, pero son enormes en comparación con estas placas SMT poco agradables. Este DRV8801 puede ofrecer un continuo 1 A en su salida y trabaja con voltajes de entrada entre 8 [V] a 36 [V]. No tuve absolutamente ningún problema con estas tarjetas, sólo el hecho de que tenía que construir un circuito del aumentador de presión para cada uno. La Junta DRV8801 se controla mediante dos pernos, velocidad y dirección. Un pin de corriente sentido regeneración es también allí (conectado a mi foto, pero no se usa por ahora).
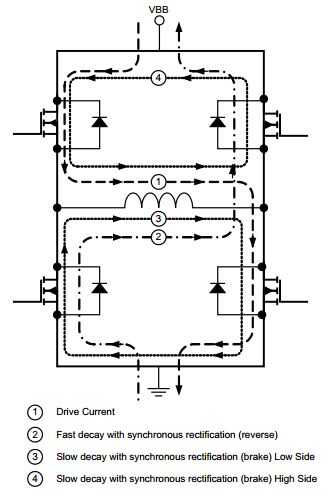
En su Texas Instruments hoja de datosse describen los principios de funcionamiento del componente DRV8801, recorta una imagen que muestra la trayectoria de la corriente, basada en la dirección seleccionada.
Dirección y control de velocidad con un solo pin PIC
Un dulce truco se puede aplicar con todas estas dirección + velocidad puentes de Unión. Uno puede controlar la velocidad y dirección con un solo perno, si lo suficientemente inteligente. Esto descubrió accidentalmente mientras trabajaba con uno de los productos de TI, pero encontró más adelante describió en uno de sus documentos de consejos y trucos. Si se conecta a la clavija de entrada de velocidad constante y ruta tu PWM en la fase / perno de dirección, controlas dos cosas con una salida PWM. Por 50% de la salida PWM que conducirá el motor adelante y atrás por la misma cantidad de tiempo, por lo que no ves el eje da vuelta en cualquier lugar. Sin embargo, al disminuir el ciclo de trabajo, dirá el motor para avanzar más, que espalda. Del mismo modo, aumentando el ciclo de deber, moverá el motor en la parte posterior que lo mueve hacia adelante. Esto dar lugar a toda velocidad hacia adelante con 0% de derecho, velocidad hacia atrás al 100% y parar en el 50%.













