Paso 3: Elaboración de los esquemas
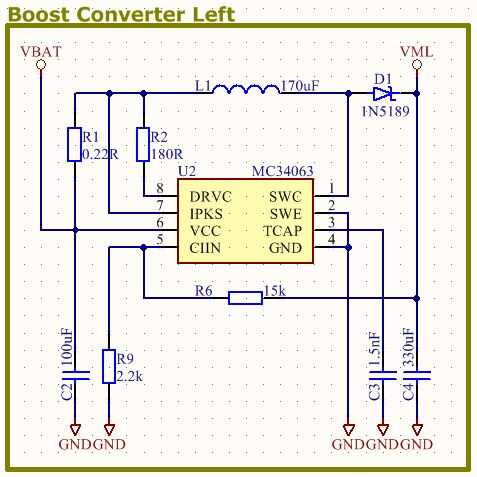
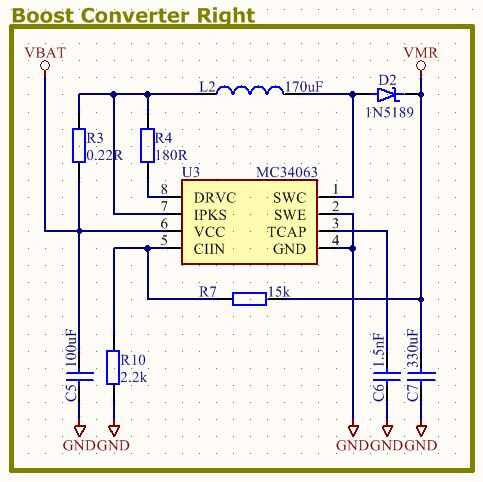
Impulsar el convertidor izquierda y derecha para carriles VMM
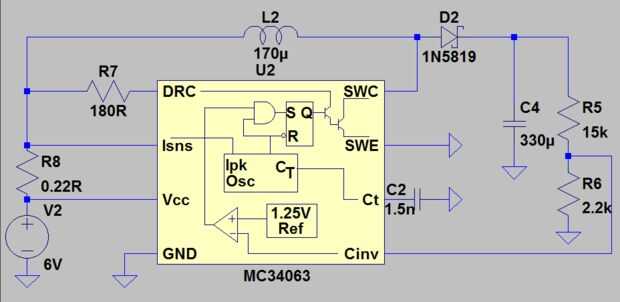
Estas no son diferentes uno del otro, sólo copia el esquema sugerido impulsar desde la hoja de datos del MC34063 y armar el esquema. También montado este pequeño esquema en LTSpice, quería ver si los rieles y los controles esquemáticos a aceptar, lo hicieron.
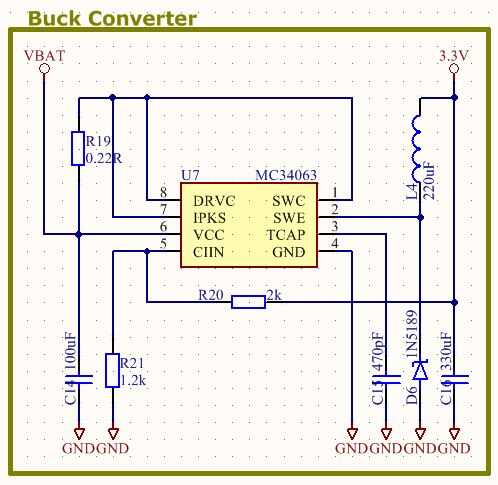
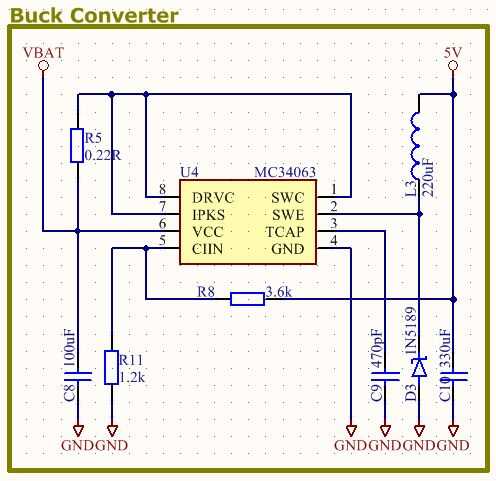
Convertidores para 5V y 3.3V del dólar rieles
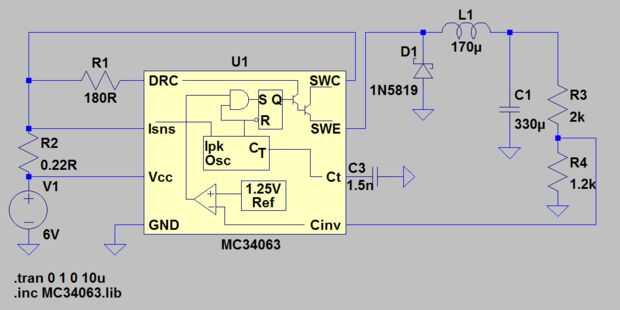
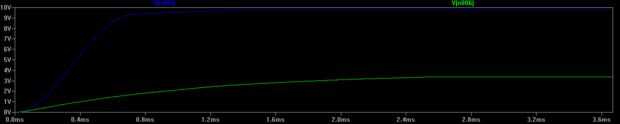
No hay mucho que decir aquí, la historia de buck es contada en un paso separado. La única diferencia entre los dos esquemas es el cambio en la resistencia de retroalimentación superior, que es 3,6 k para la salida [V] 5 y 2k para la salida [V] 3.3. Hay un LTSpice esquemático para estos también, por la misma razón que había para los aumentadores de presión.
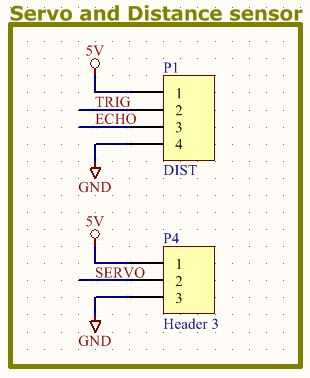
Conectores de interfaz de Consejo superior
El motor servo y el detector ultrasónico gama conectan a estos pines. ¡ ADVERTENCIA! Para mi propia comodidad, cambió el orden de las patillas de la cabecera de servo! Esto significa que el enrutamiento y la conexión se verán afectados también. No hay modificaciones en la conexión HC-SR04, que será una simple hembra recta - hembra cable.
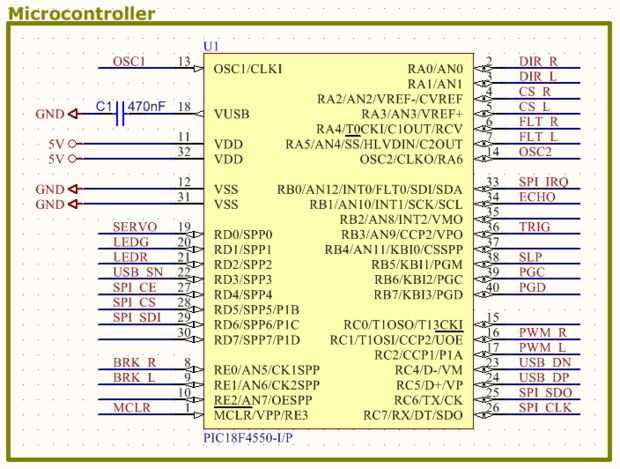
Microcontrolador
Es la unidad de control principal del proyecto, todas las redes, ya sea comentarios, señal de comunicación, pulsos, PWM - terminan aquí. Todos los pines de alimentación del PIC18F4550 deben conectados y desconectados con los condensadores [nF] 100. El pin VUSB debe ser desacoplado con 470 [nF], un valor recomendado en ficha técnica.
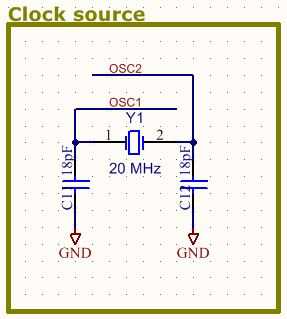
Oscilador de
La fuente de reloj principal del microcontrolador y los dos condensadores a masa, como se recomienda en la hoja de datos.
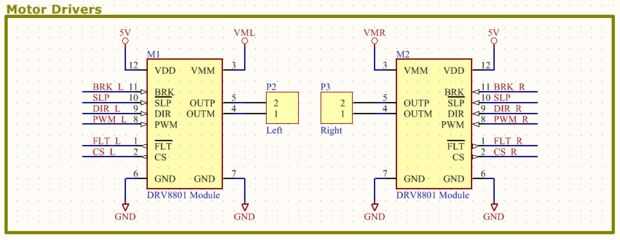
Controladores de motor
Los controladores de motor son realmente fábrica de tableros, dibujé símbolo y huella a la Junta, en vez de poner el puente en H IC por separado en mi tablero inferior. Son hechos por chipy puede suministrarse con un motor voltaje entre 8 [V] y 36 [V] (de ahí la necesidad de aumentadores de presión). Estas placas poco pueden ofrecer 1 corriente nominal [A] y 2,8 [A] corriente de pico. Cada pin I/O que este tablero tiene está de alguna manera conectado con el PIC para el control y eventual desarrollo futuro. Tal desarrollo sería leer nuevamente la corriente que fluye a través de los motores, por lo que uno les puede apagar en caso de pérdida de sustentación.
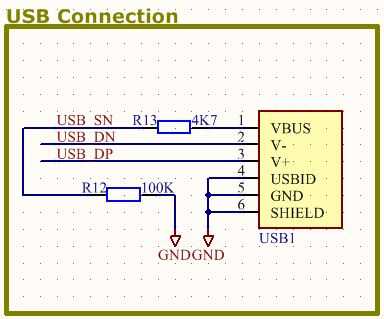
Conexión USB
Este es el conector a través del cual ocurren las actualizaciones de firmware. El pin de alimentación USB está conectado a través de un resistor a una I/O del MCU. Si se agrega no hay resistor en serie para limitar la corriente, el PIC se alimenta a través de su pin de I/O, y pueden ocurrir cosas inesperadas - esta resistencia es necesaria.
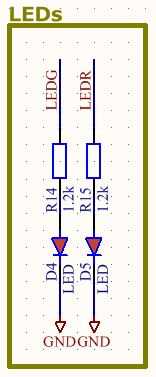
LED
Dan estatus sobre el gestor de arranque y el estado de la actualización del firmware cuando programación y puede ser utilizado para la depuración en modo de aplicación. Envió una señal [Hz] 1 para el LED rojo, así que sé cuando el PIC está vivo. Esto es una señal de latido del corazón que le hace notar un microcontrolador ejecutando mal o no simplemente mirando.
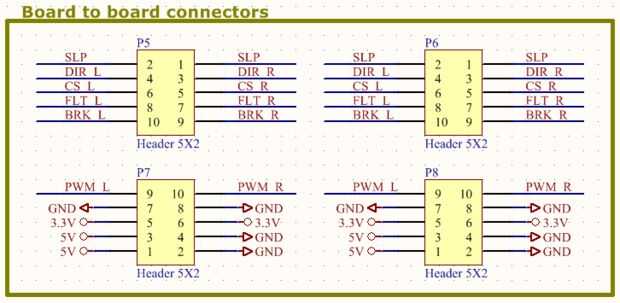
Conectores de la placa
Guía de las señales del tablero de fuente de alimentación a la tarjeta de control. Las señales de control del motor y carriles de la energía se dirigen a estos pines.













