
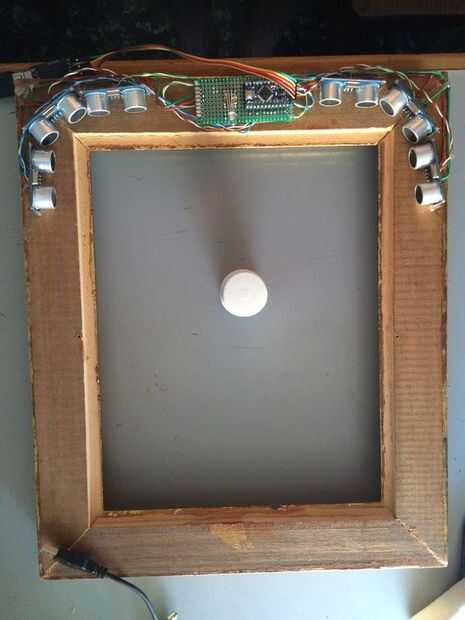
Este Instructable describe un escáner marco hecho con detectores de la gama ultrasónica en Arduino.
Los detectores de gama se colocan a lo largo de la parte posterior del marco. Cuando un objeto (un puntero) se introduce dentro del marco de la distancia de los sensores se recupera y la posición del objeto se calcula por medio de funciones trigonométrica. Esta información (la posición de la aguja) se muestra en una pantalla y puede ser utilizada para otros propósitos (en este caso para el control de un ánodo común conducido, cuyo color cambia según la posición de la aguja).
Considerable (inútil...) se dedicaron esfuerzos para determinar el mejor número y posición de los sensores. La exactitud de las lecturas es sólo moderada, y por lo tanto la precisión de la localización es sólo moderada.






 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")

![Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)](https://foto.askix.com/thumb/170x110/9/44/944b4e3d55d5395583213b4d0d36ee0e.jpg "Escudo del Motor Arduino DIY [por sólo $8!] (L298N 2x4A)")




