Paso 11: estoy perdido y no puedo encontrar mi camino a casa
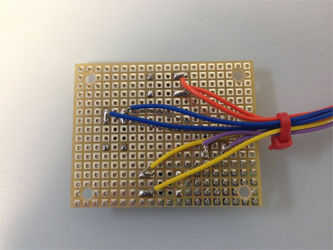
Los motores paso a paso no acumulan errores y por lo tanto el posicionamiento es muy preciso. El problema viene si hay una interrupción de energía. La tabla x-y 'sabe' Dónde está solamente concerniente a donde empieza, por lo que si el poder se apaga, va a pensar 'casa' es donde despertó. Pasamos un pensamiento de largo plazo de maneras de lidiar con esto. Una posibilidad era añadir sensores de contacto para permitir que la tabla calibrar a sí mismo a una posición fija. También podríamos haber añadido escritor tarjeta de memoria flash para llevar un registro de la posición segura si había una energía hacia fuera. Al final nos fuimos para una solución de baja tecnología. Hemos hecho un simple D-pad de 4 botones momentáneos. Cada bucle, el código parece para ver si estos han sido presionado y entonces unidades de la tabla en la correspondiente dirección. El D-pad es un simple pedazo de perf board con los botones de soldado en (la imagen muestra la parte de atrás). La longitud de los cables de conexión le permite ser escondido en el caso de cuando no es necesario. Esto funcionó muy bien y nos ha permitido alinear fácilmente la primera muestra con el LED cuando nos estábamos preparando.
Nota: se dará cuenta en el código que utilizamos la biblioteca Arduino Stepper.h incorporada para funcionar los motores PAP en modo manual.
")



")
")







