Paso 9: Montaje de los motores, CES y PDB


El objetivo es fijar el motor a cada brazo con por lo menos dos tornillos o fijar la placa del motor para el brazo con por lo menos dos tornillos (la placa del motor ha sido instalada en el motor).
Algunas estructuras multirotor has simplemente uso un lazo de alambre para fijar el motor los cables al brazo. Sin embargo, esta construcción oculta el cableado dentro de la tubería de aluminio. Desde una perspectiva de vuela, cualquier método funcionará. Quiero ocultar el cableado para evitar daños en caso de choque. Los dibujos y fotografías muestran el agujero de entrada para los cables de los motores.
Con los brazos montados y los motores montados en los brazos, la ruta del cableado del motor a través del tubo desde el exterior al centro del marco. Ahora, agregue un marcador de cinta para indicar el número de motor. Ayuda para agregar un marcador idéntico al brazo. 'M1', 'M2', 'M3' y 'M4' es un buen esquema a utilizar. Consulte la documentación para su electrónica de control de vuelo determinar que motor es M1, M2, etc..
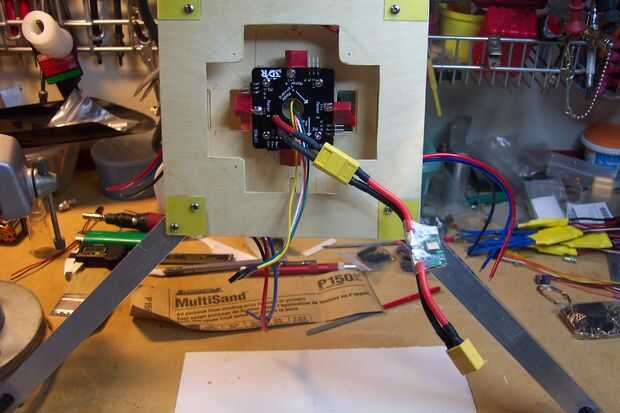
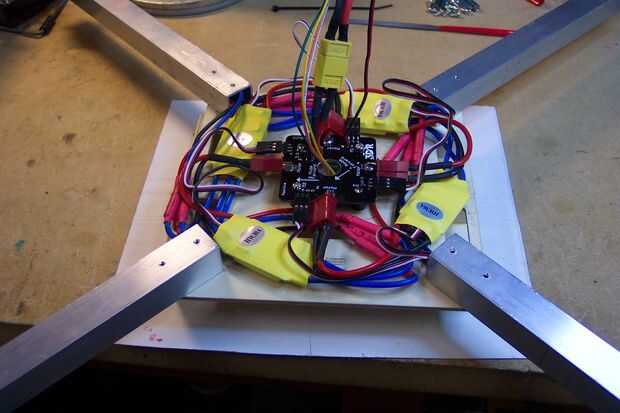
Ahora instalar el PDB en placa 2. Asegúrese de que los cables de la batería pueden ser conectado sin agotar las conexiones.
Los CES están montados entre placa de 2 y 1 placa con nylon-lazos de alambre como se muestra en la imagen. Si las señales de impulsión se enrutan a través de la Junta, asegúrese de que tener la correcta ESC conectado al lugar correcto en el PDB. Marcar la salida y el cableado es una buena idea. Esto puede parecer algo tonto, pero después de muchas discusiones sobre DIY Drones donde trató de ayudar a los constructores con problemas multirotor, muchos de los fracasos iniciales han sido porque se mezclan el ESC y las conexiones del motor. Tomar un poco de tiempo ahora y hacer su vida más fácil más adelante.













