
Hola todo el mundo,
Este Instructables se divide en dos fases, que hace conveniente para el principiante y los diseñadores de robots intermedios.
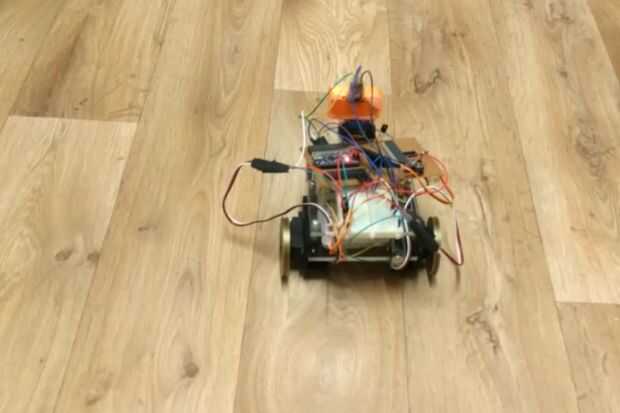
La primera fase abarca el uso de la placa de arduino nano solamente como controlador. Con esto, vamos a construir un robot:
-que puede ser controlado manualmente mediante un control remoto IR o un dispositivo móvil con emisor de infrarrojos.
-que se mueve alrededor de manera autónoma, evitando obstáculos.
La segunda fase se publicarán como un segundo instructivo y puede ser ignorada si eres principiante o no desea hacerlo. La segunda fase será una extensión de esta primera fase usando una tabla de frambuesa pi. El robot tendrá ahora nuevas funciones como:
-puede agarrar y levantar objetos.
-capaz de detectar una bola automáticamente usando una cámara y recoger la bola.
-tomando la bola a una estación base y dejar caer el balón allí.
-identificación de estación base con el uso de símbolos o códigos QR.
-frente a la detección y seguimiento
-identificación de algunos objetos
Ambas fases utiliza el mismo diseño de robot, grandes no cambios a la adición de una frambuesa pi.
Quiero decirles que este es mi primer siempre robot, primera vez he codificado nunca nada y primera vez para diseñar algo, impresión 3d y también láser corte. Así, por favor ves algunos errores "menores" en el robot, pero le guiará a través de cómo corregirlos. Si usted está listo para comenzar, luego permite excavar en!.

")

")





")



