Paso 4: Hacking Servo para rotación continua




Los archivos: http://1drv.ms/1N1eZ8p
Un servo puede girar solamente entre 0 y 180 grados. Como queremos que nuestros dos servos para servir como ruedas, debe mantener girando en 360 grados. La idea de este hackeo es para servos giran a una velocidad dada y también deje de usar los códigos en Arduino.
-Entre los valores de 0 y 89 grados sus servos deben girar hacia la derecha con 0 siendo la velocidad más alta y 89 es el más lento
-En el valor de 90 el servo se detiene y,
-Entre los valores de 91 y 180 grados sus servos deben girar hacia la izquierda con 180 siendo la velocidad más alta y 91, siendo el más lento.
Siga cualquiera de las 2 opciones para hackear sus servos:
1: Mira este video de Youtube de cómo hackear su servo: https://www.youtube.com/watch?v=SK8mhnEzcvY
Video explicado:
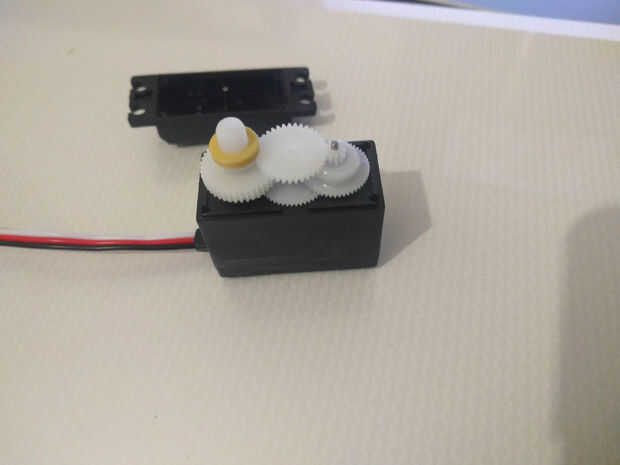
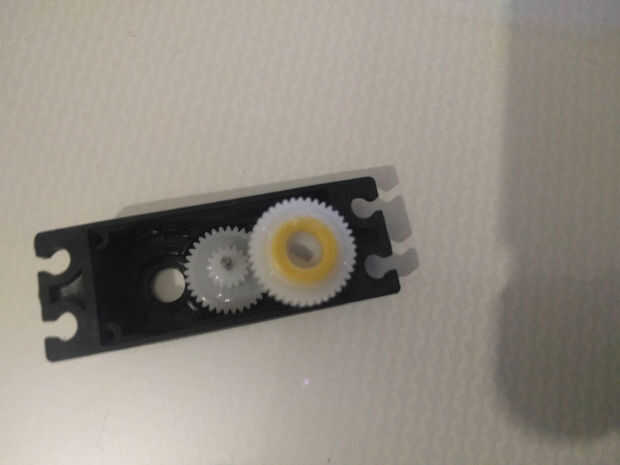
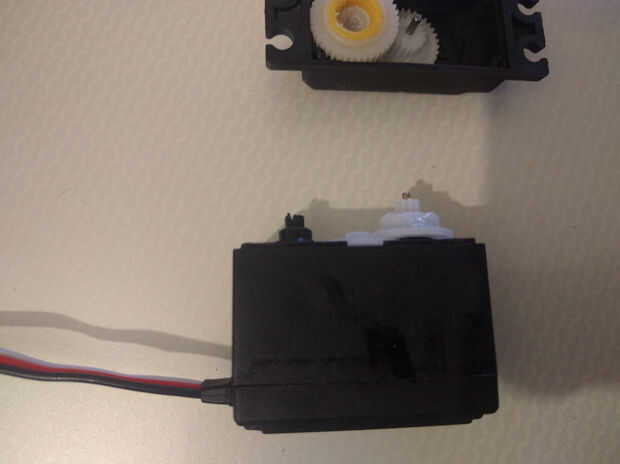
Después de disimular el servo, corte un pequeño espacio en el potenciómetro y ampliando el agujero en el servo engranaje como se muestra en el video y las fotos de arriba.
En la carpeta de archivos: > y, descargar o abrir la carpeta >Servo_Con_1 y carga Servo_Con_1.ino. Subirlo a tu nano.
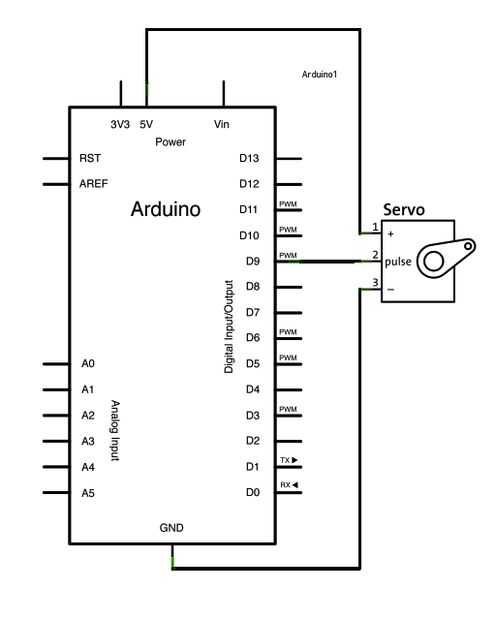
Ahora Conecte el servo tal como se ilustra en el esquema. (Revise la hoja de datos de tu servo para que conectar el cable adecuado en el lugar correcto). Normalmente el cable negro es tierra ;::; cable blanco o naranja al pin PWM (pin 9 por ejemplo) y ;::; cable rojo para 5v
Conectar tu arduino uno a su dispositivo y cargar el código. El servo debe empezar a girar
Ahora gire el potenciómetro con un destornillador hasta que el servo detenga, ajustar hasta que no twitch y detenga completamente.
Después de llegar al punto en que deja de crispar y de rotación, adhiera el potenciómetro para evitar que se mueva después de armarla. El problema que tuve con este era que el pegamento no mantenga apretado, así que cortan la cabeza del potenciómetro. Ver el segundo método, si tiene problema con esto, o si no pase a la depuración.
O
2: Si después de montar, el motor comienza a girar o twitch, sugiero cortan ligeramente el potenciómetro para que el equipo no gira el potenciómetro cuando el servo comienza a girar. Use un cuchillo de filo para ajuste potenciómetro si es necesario hasta que deje de girar y fasciculaciones.
Nota: Asegúrese de que el servo esté conectada a tu arduino al potenciómetro.
Depuración:
En la carpeta de archivos: > y, descargar o abrir la carpeta > Servo_Con_2 y Servo_Con_2.inode carga. Subirlo a tu nano.
Ejecutar el código y el servo debe seguir una secuencia de rotación hacia la derecha, parada, anti rotación a la derecha...
Si no, revise la conexión otra vez o trate de ajustar el potenciómetro

")

")





")



