Paso 5: montaje










Archivos: http://1drv.ms/1N1eZ8p
IMPRIMIR SOLAMENTE AGARRE PARA FASE 2
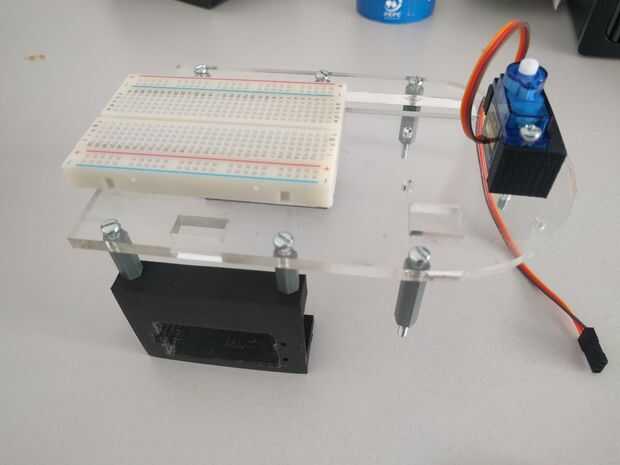
Ahora, vamos a empezar a poner nuestras materias juntos.
Todos los pasos están ilustrados en las fotos anteriores.
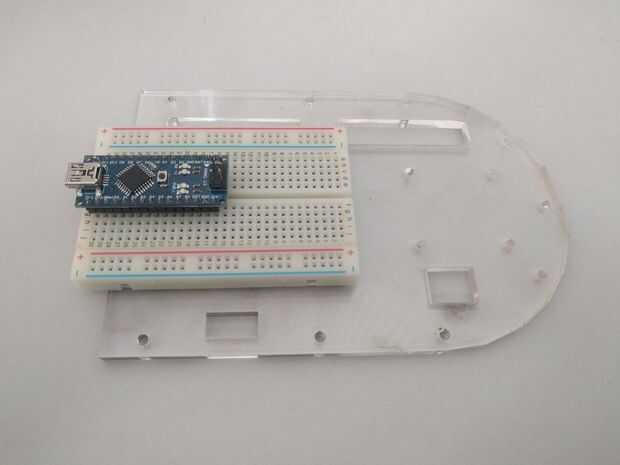
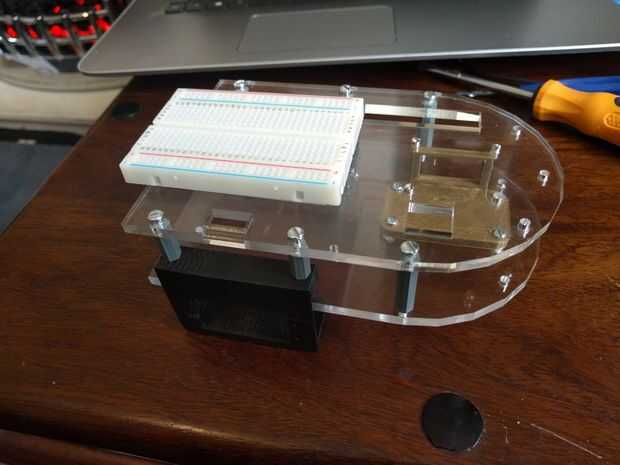
1. Si usas una placa de prototipo board, adjuntarlo a la tablero superior.
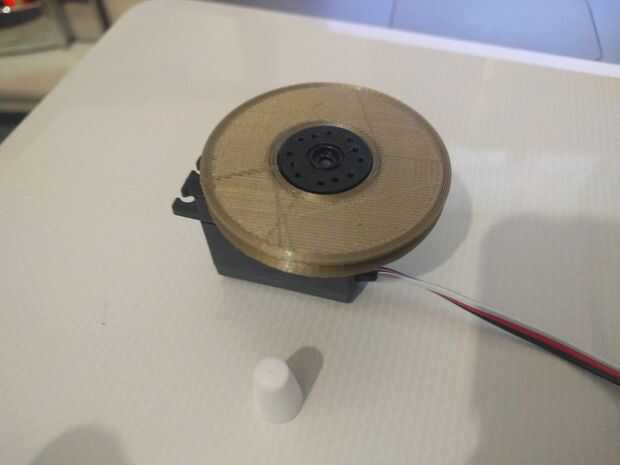
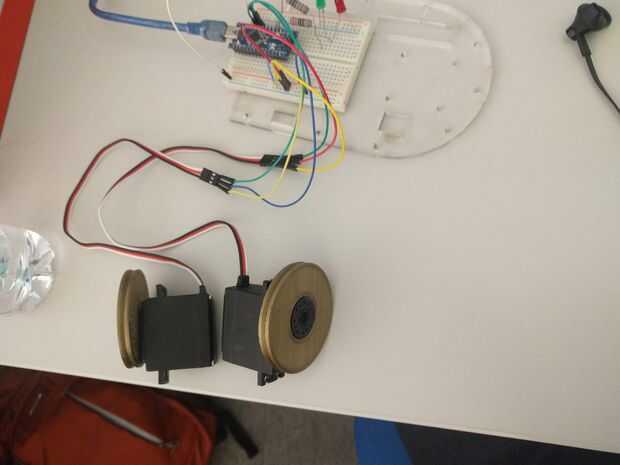
2. Fije los engranajes futaba a las dos ruedas traseras con un pegamento. Si los engranajes no caben ampliar haciendo girar un cuchillo dentro de la ranura de la rueda.
3. cuando se haya secado el pegamento Fije la rueda a servo y compruebe si gira sin problemas. (no pegar todavía).
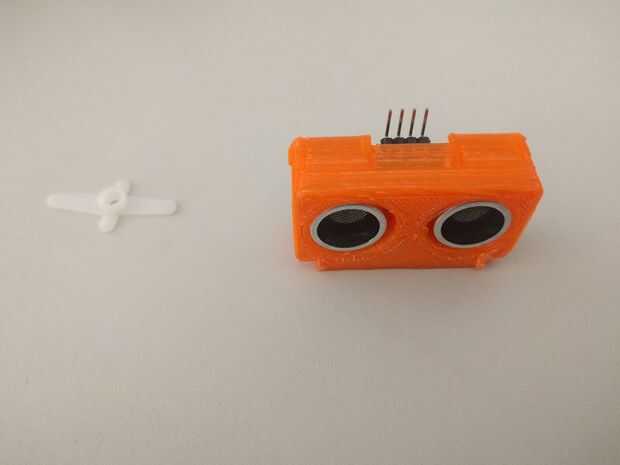
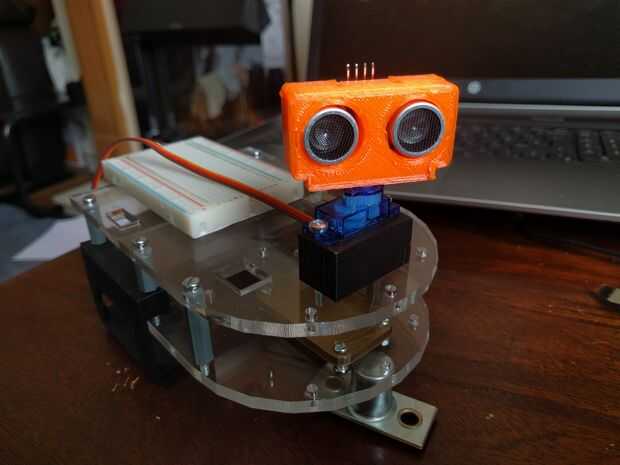
4. conseguir su sensor ultrasónico e inserte en sensor ultrasónico f_holder luego pegue un engranaje de un mini-servo tal como se muestra en la imagen a la parte inferior de la sensor ultrasónico f_holder. Ahora poner esto en un servo después el pegamento ya seco y compruebe si gira muy bien. (no pegar a servo todavía).
6. Conecte un mini servo a un soporte motor con los tornillos. Luego fíjela a del tablero superior con tuercas.
7. obtener la extensión de la rueda delantera y corte la extensión a la longitud que desee (obviamente no a alto o demasiado bajo). Pega a la rueda y luego inserte las canicas en rueda. Coloque en el tablero inferior.

")

")





")



