Vamos a hacer un simple robot equilibrio invertido y operar él.
Usted necesita solamente medio día hacerlo, si tienes un arduino y algunos materiales.
[un vídeo de un robot que haría]
Introducción:
Después de unos pocos con arduino, he pensado de hacer un péndulo invertido. Luego tuve dos directivas para el proyecto.
- simple como sea posible
- arranque (sin hacer referencia al sitio web)
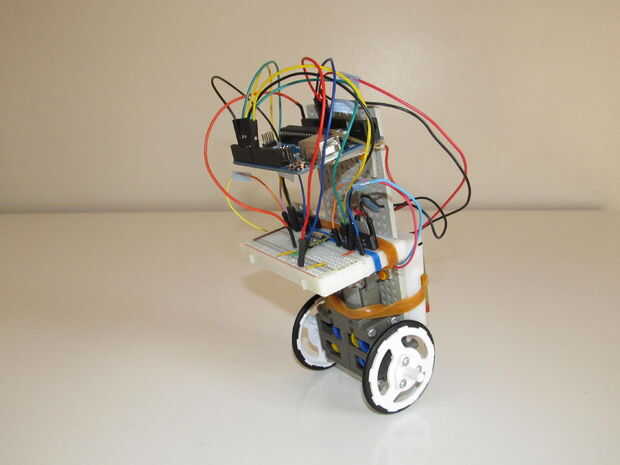
Aunque se ha mantenido (* 1), que ha exigido más de toda una semana para hacer balance de mi robot sí mismo. Así sencillez de mi robot parece que se celebrará en su cuerpo, el circuito y el programa (llamado "boceto"). Tiene sólo un girocompás-módulo analógica (a $4 (* 2)), dos avión motores ($1,5) y dos ICs análogos (en $1,5) para estos motores.
(* 1) Me he referido a páginas web de dos cuestiones; utilizar una fórmula para el péndulo invertido y una solución de problemas del módulo giroscopio.
(* 2) 100 yen = 1 USD, utilizar como tipo de cambio.
Una placa sin soldadura en una foto mostraría su simplicidad. Y un video de bajo la misma funciona bastante bien.
Uno que ha hecho un parpadeo del LED con arduino nunca podía montar su robot invertida en medio día o menos, según mi receta más abajo. Pero creo que es similar a la solución de un rompecabezas para hacer equilibrio sobre las ruedas. Así muestro una solución en tres pasos no echar a perder un rompecabezas. Quiero videos y fotos podrían cubrir a mi pobre inglés.
* Una versión en japonés de este instructable está disponible también.
** Más información, 20 de agosto de 2014:
Un programa alternativo más simple, ver2.0, ha estado disponible en el paso 5.
Otra versión se ha publicado después, en el que un sensor de giro de salida digital producido por STMicroelectronics se utiliza en lugar de dos sensores de la salida analógica. Es más fácil conseguir el giróscopo digital fuera de Japón. Y el fino de soldadura en el paso 2 no es necesaria para el giro digital.






 :-)")
")

")
![[Muy fácil] Hidrógeno alimentado pistola de patata con cero](https://foto.askix.com/thumb/170x110/4/0e/40e166c7e9a20c680177052a011d6281.jpg "[Muy fácil] Hidrógeno alimentado pistola de patata con cero")


")