Paso 11: Desarrollar Robot
Vamos a hacer tu robot invertida o su conocimiento evolucionan más. Aquí tres formas se muestran brevemente. Sería difícil al terminar la segunda o la tercera vía dentro de medio día.
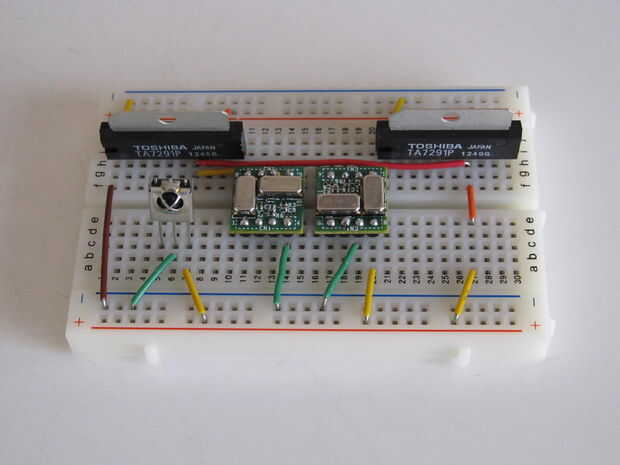
(1) sensores dobles
Agregar otro módulo de giro en el protoboard de tu robot e investigar si se mejora su estabilidad en el equilibrio.
[antecedentes de un robot con sensores doble]
(2) control remoto operación con ningún cable
En el paso 9 tu robot es operado a través de cable USB. Ahora tu robot está desenchufado. Así que vamos a operarlo con ningún cable. En términos de simplicidad, un módulo infrarrojo sería la primera opción.
[una demostración del funcionamiento de robot por control remoto de un TV]
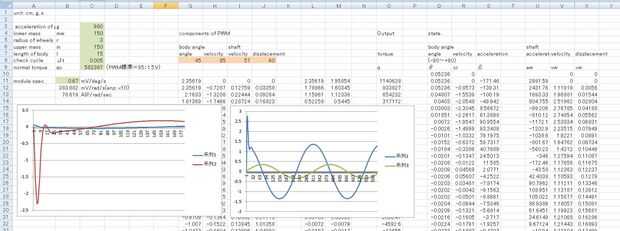
(3) que simula la acción de un Robot invertida con Excel
Nuestro robot invertida podría pensarse construido de tres partes: cabeza, cuerpo y ruedas. En esta simplificación, puede escribirse una ecuación de movimiento del robot con una física que aprendió en el Colegio. Como conseguir que, la acción del robot puede ser simulada usando Excel. Los valores cerca de-correcto de dos coeficientes en Nota 3 en el paso 5, k1 y k2, podrían ser conseguidos por esta simulación.






 :-)")
")

")
![[Muy fácil] Hidrógeno alimentado pistola de patata con cero](https://foto.askix.com/thumb/170x110/4/0e/40e166c7e9a20c680177052a011d6281.jpg "[Muy fácil] Hidrógeno alimentado pistola de patata con cero")


")