después de largo descanso forma Instructables, soy nuevo y con un nuevo proyecto: un follonero accionado propano engañosamente simple y muy eficaz (que va BOOM!) No tengo fotos reales sin embargo, así lo haré con algunos diagramas de MS-Paint cutres
quiere escuchar su música favorita fuerte, pero no tienen ningún amplificador potente?? ¿quieres tener música hizo uno mismo??? ¿es aburrirse de inútil y desagradable sonido mono de tv, reproductor de música, dvd?? Quiero tener un uno mismo hecho fre
yo he estado haciendo varias pulseras para un rato ahora, y mi otra mitad ha sido pedir algo que se ve bien, no es demasiado abultado, pero lo más importante no tiene un clip de plástico. Esto es lo que se me ocurrió!También siento que debo señalar q
Hola compañeros de Instructables,Creo que me se obsesiona con luces y cosas que pueden utilizarse para crear efectos de luz impresionantes. Esta vez es un muy fácil de hacer pero elegante, elegante busca ambiente lámpara de mesa de. Créeme es muy fác
este instructable es en la fabricación de un interruptor momentáneo muy fácil y útil, un interruptor parcial o "push-to-make" que sólo se activa cuando se presiona. también, al final hay un fácil ejemplo de lo que podría hacerse con este tipo d
Hola, este es mi primer instructable, no sé si hay cualquier instructable como mina... yo nunca vi uno de este tipo así que, hice mía... No tengo una cámara, así que tomé las fotos con mi celular!Así que primero necesitamos:¡ ADVERTENCIA! leyendo mi
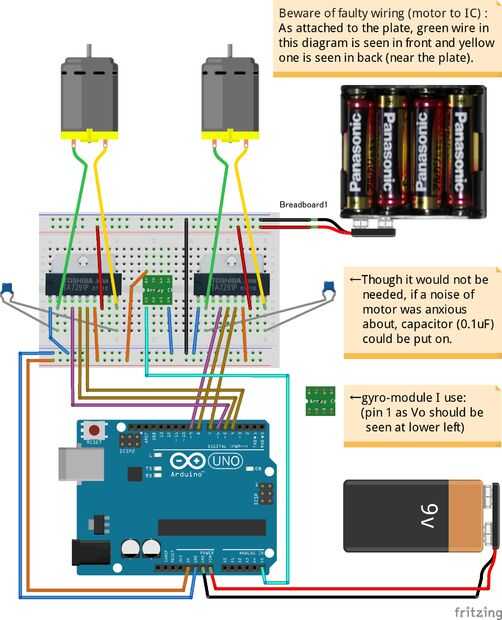
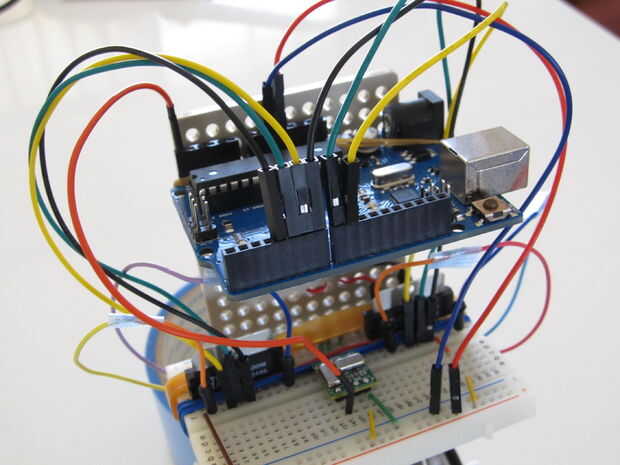
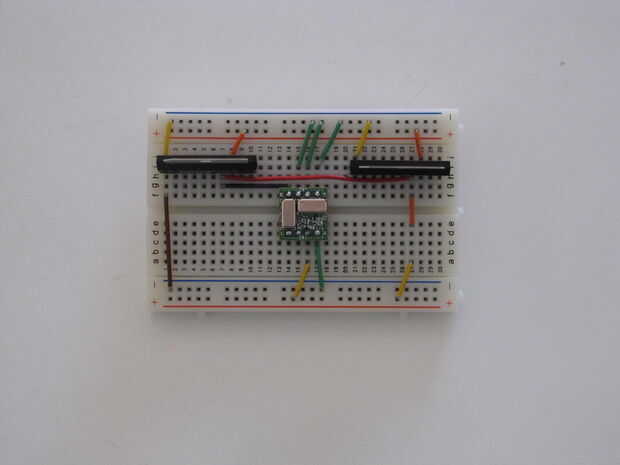
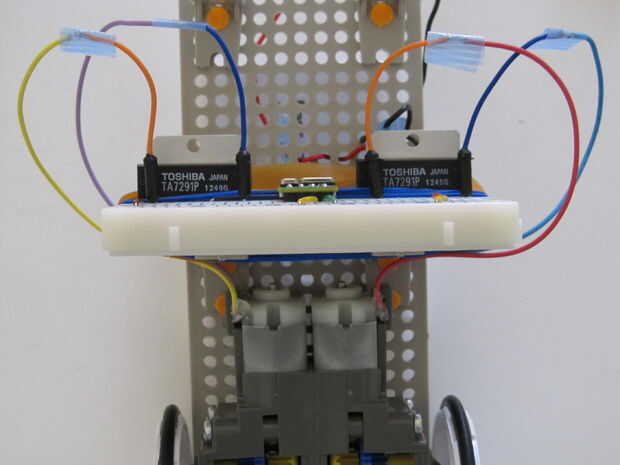
HLO amigos!!!!!!Este es mi nuevo instructablesEn foto de arriba es solamente áspero montaje del robotTe guiará que cómo hacer tu primer Robot con Arduino muy fácilPaso a pasoAsí que vamos a reunir todas las piezas necesariasPaso 1: Reunir el Material
este cenicero es muy fácil de hacer. Se tarda unos 10 minutos y puede hacerlo en cualquier lugar. Cuando usted se junta, tiene una lata de cerveza vacía y tijeras, por qué no hacerlo y sorprender a tus amigos!Paso 1: Usted necesita... • Tijeras• Lata
Nota: cuanto más tiempo el panel que está expuesto al sol el más caliente el aire se mete como se levanta.Me explico en esta página, para que entender por qué funcionan estos paneles:En la parte inferior del panel el aire entra a temperatura ambiente
En este Instructable voy a enseñarte a crear un escudo de Arduino Uno muy fácil.No entraré en demasiados detalles, pero he incluido un vídeo dónde se puede ir un poco más en profundidad sobre cómo utilizar el software.Utilizar la aplicación web de Ea
EN este INSTRUCTABLE me vas Dile que cómo para hacer un muy fácil hidrógeno alimentado pistola de papaPaso 1: Materiales necesarios NecesitamosUna botella de2 clavosAdhesivo o selladorCargador o la bateríaCodo 90Un tubo de Pvcy algunas herramientas a
han llorado sangre cuando se trata de su primera hoja soldado con autógena patrón?Aquí hay algo fácil que comenzar y aumentar tu confianza...Este instructible asume un conocimiento de trabajo de la soldadura del patrón.Se trata de un reciclable instr
esto es un regalo muy fácil puede dar su amor en el día de San Valentín! Es sólo lo suficientemente grande como para caber las plantas con raíces pequeñas.Paso 1: materiales... Aquí es todo lo que necesitas:Pinzas para la ropaUna lata como una comid
mi mamá muchas veces hacer esta receta para el desayuno y tiempo para la cena. Esta receta es muy fácil de hacer y rápidamente se puede hacer con menos ingredientes (sólo 3).Se puede usar para comer con pan o chapati (roti) o usted puede comer direct






 :-)")
")

")
![[Muy fácil] Hidrógeno alimentado pistola de patata con cero](https://foto.askix.com/thumb/170x110/4/0e/40e166c7e9a20c680177052a011d6281.jpg "[Muy fácil] Hidrógeno alimentado pistola de patata con cero")


")