Paso 12: Conecte el receptor de Radio al controlador de vuelo



Con el controlador de vuelo y el receptor montado en el cuerpo del quadcopter, en este paso será eléctricamente conectamos el controlador de vuelo y el receptor de radio usando conectores de servo de tres hilos.
Con el controlador de vuelo y el receptor de radio que ambos Unidos al quadcopter, nosotros podemos ahora conéctelos eléctricamente.
Ahora, voy a tomar un momento para explicar las conexiones del receptor de radio, luego, en la próxima sección, voy a explicar las conexiones en la KK2.1 y finalmente explicaré cómo acoplar los dos.
Acerca de las conexiones del receptor de Radio
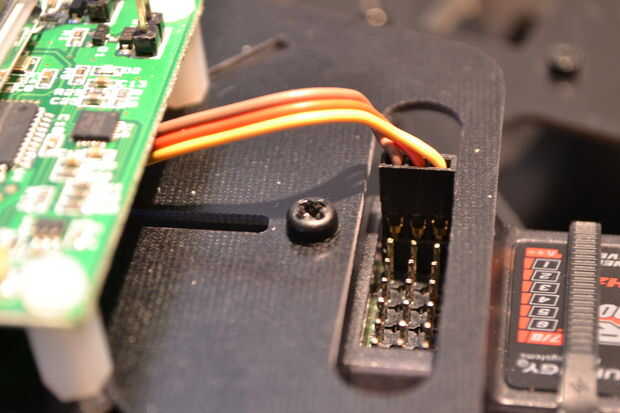
Por lo tanto, si usted toma una mirada en el receptor de radio, usted notará que las conexiones vienen en grupos de tres pernos. La etiqueta en la parte superior del receptor muestra que filas pertenecen a qué canal. Cada canal corresponde a una acción diferente sobre el transmisor de radio. Por ejemplo, canal uno recibe comandos cuando mueves la palanca derecha a la izquierda y derecha, canal dos recibe comandos cuando usted mueve la palanca derecha hacia arriba y hacia abajo, etcétera
Cada uno de los tres pernos para cada canal lleva una conexión eléctrica. Hay una pequeña leyenda poco debajo de la etiqueta de canal uno que muestra que pin lleva cual señal, pero esta leyenda es difícil de ver, así que permítanme ponerlo en palabras: la fila exterior de pines es la fila del medio de los pernos es poder y la fila interna de pernos es señal.
Acerca de las conexiones de KK2.1
Ahora que usted entiende las conexiones del receptor de radio, dirigir su atención a la Junta de control de vuelo. Busca en el tablero de la parte inferior (lado de botón) encontrará las conexiones para el receptor de radio a la izquierda de la pantalla. Hay cinco filas de tres pernos. Al igual que en el receptor de radio, cada fila de tres pernos corresponde a un canal transmisor de radio diferentes.
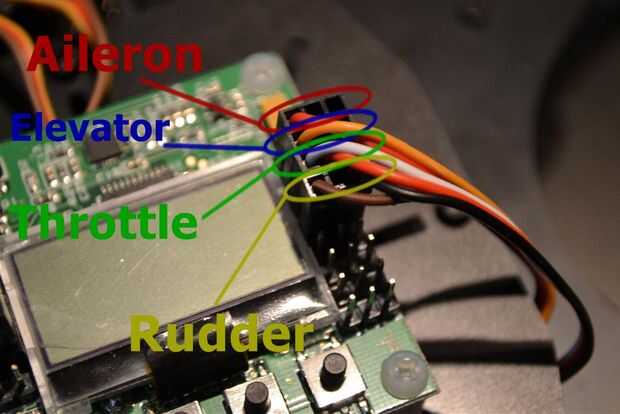
Los canales de la Junta KK2.1 son un poco más difíciles de entender que en el receptor de radio aunque porque, si usted toma una mirada en la parte inferior de la placa (puede que necesite para dar un vistazo a través de una ranura en la placa de montaje), te darás cuenta que las filas están etiquetadas para los aeroplanos, no para quadcopters. A partir de la fila superior de los pernos, la orden va alerón, elevador, acelerador, timón, auxiliar. Estas etiquetas corresponden a varias superficies de control (aletas) utilizadas para el control de aeronaves en vuelo. Por lo que tendremos que formar un mapa mental de la forma de que estos controles de avión corresponden a controles quadcopter.
Al igual que aviones tienen cuatro canales de control, así también hagan quadcopters, pero la terminología utilizada para el control del quadcopter es un poco diferente. El control de cuatro canales es rodillo, echada, desvío y acelerador. Para traducir las conexiones del receptor KK2.1 de terminología de avión quadcopter terminología, sólo tenemos que sustituir las palabras relacionadas con avión para palabras relacionadas con el quadcopter:
AILeron → roll
campo de elevator →
Rudder → desvío
THRottle → válvula reguladora (que significa altura de quadcopters)
Esta terminología es realmente muy importante. Asegúrese de que memorice la relación entre los controles del avión y de quadcopter porque en el resto de este tutorial a menudo usarán estos términos indistintamente; y esto es lo mismo para muchos otros sitios. Hará su vida mucho más fácil si no tienes que venir aquí a mirar la tabla de arriba cada vez encuentro una de esas palabras.
La conexión auxiliar es la misma para los aeroplanos y quadcopters ya que sólo se utiliza para el control de otros accesorios como las luces o la característica de auto-nivelación.
Conectar el receptor de la Radio al controlador de vuelo
Armado con el conocimiento nuevo de la radio receptor y vuelo controlador pin, podemos ahora conectar las dos partes juntas. Antes de comenzar, hay sólo una pieza más de información a considerar: el receptor de radio, todos los pines de masa y energía (las patillas exteriores y mediados) están conectados juntos. Por lo tanto, sólo necesitamos conectar patillas de una tierra y una energía a la tarjeta de control de vuelo KK2.1. El resultado práctico de esto es que sólo necesitaremos tres servos para completar todas las conexiones eléctricas.
En primer lugar, enchufe uno de servo conduce a través de los tres pernos en el receptor de radio que corresponden a canal uno. Oriente el tapón de modo que el cable marrón en el exterior. Luego, conecte el otro extremo del cable de servo en el enchufe del alerón en el tablero KK2.1, que es la superior. Este enchufe debe orientarse con el cable marrón en el pasador exterior. En mi quadcopter, pegué el cable por debajo de la tarjeta de control de vuelo para evitar que el hilo colgando al aire libre.
Ahora para el siguiente cable. Puesto que ya hemos conectado un cable de masa y energía de la Junta KK2.1 para el receptor de radio, sólo necesitaremos una conexión de señal para las restantes tres señales. Convenientemente, los servos suceden que tiene tres cables. Por lo tanto, conecte el segundo servo bajando por la fila de dentro de pasadores (pines de señal) con el cable amarillo conectado a canal dos, el cable rojo conectado a canal tres y el cable marrón enchufado en el canal cuatro. Luego, conecte el otro extremo del cable los pines más cercanos a la pantalla en el KK2.1. El cable amarillo debe ser más cercano al enchufe de alerón.
Hay una última conexión para hacer, la conexión para el canal auxiliar, que vamos a utilizar para activar y desactivar la función Self-leveling de la KK2.1 por la izquierda encienda el transmisor de radio. Más en eso más adelante, por ahora Conecte otro cable de servo, esta vez a través de toda la quinta fila de columnas en el receptor de radio. Conecte el otro extremo en la quinta fila de pines en el KK2.1.



")


 Mod")

")




