Paso 20: uno mismo-Nivel configuración
El KK2.1 tiene la capacidad para mantener automáticamente el nivel de quadcopter como volamos, usando la función automática de nivel. En este paso vamos a establecer la función automática de nivel para optimizar la capacidad de los quadcopter para mantener una nivel orientación en el aire.
Hay muchas cosas que me encanta de la tarjeta de control de vuelo KK2.1 incluyendo su factor de forma pequeño y ligero, la facilidad con que puede ser configurado, su versatilidad y su característica uno mismo-nivel, que es objeto de este paso. Cuando en uno el nivel del modo, el KK2.1, como usted probablemente puede adivinar, intenta mantener el quadcopter más plana posible durante el vuelo. Uno mismo-nivel es una gran característica para las personas que son nuevas para volar quadcopters, reduce considerablemente la posibilidad de perder control y estrellarse. Vuelo en el modo automático de nivel también es agradable para hacer fotografía aérea o videografía puesto que hace el quadcopter una plataforma estable, agradable para tu cámara.
Sin embargo, para que la función automática de nivel a trabajar bien, vamos a necesitar personalizar algunas opciones para el quadcopter SK450 gato muerto. Afortunadamente, este paso no requiere mucha explicación porque lo realmente hará es calibrar otro lazo PID como hicimos en el último paso, este tiempo el lazo de PID se utiliza para un diverso propósito.
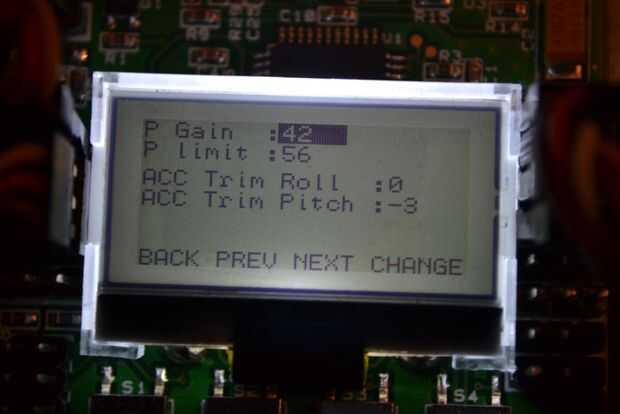
Configuración automática de nivel
- Ganancia P: 42
- Límite de P: 56
- Rollo moldura ACC: 0
- Pitch Trim de ACC: -3
Antes de concluir este paso, quería incluir un final poco de teoría sobre el valor de Pitch Trim ACC. La razón que disminuyó ese valor de 0 a -3 tiene que ver con la geometría de nuestro quadcopter SK450 gato muerto. La diferencia entre un X quadcopter normal y nuestro quadcopter SK450 gato muerto está en la posición del Motor 1 y Motor 2. En comparación con un quadcopter normal, los brazos delanteros de nuestro quadcopter de gato muerto son en ángulo por 25o. El valor negativo de Pitch Trim ACC ayuda a prevenir el quadcopter se vuelque hacia adelante ya que, en relación con un quadcopter normal, hay menos elevación de la parte delantera de la nave. Si montas una cámara pesada en la parte delantera, puede disminuir este valor un poco más.



")


 Mod")

")




