Paso 6: programación
Utilizamos un cuadro de Edison de Intel, que es compatible con todos los dispositivos de hardware en sistema arduino. Esto es para que podamos desarrollar y ampliar las funciones relacionadas. Además, se utiliza un software de lenguaje gráfico, SmartNode para programar el robot. Su interfaz es limpia, simple y fácil de depurar. Uno puede conectar directamente a él mediante una red inalámbrica.
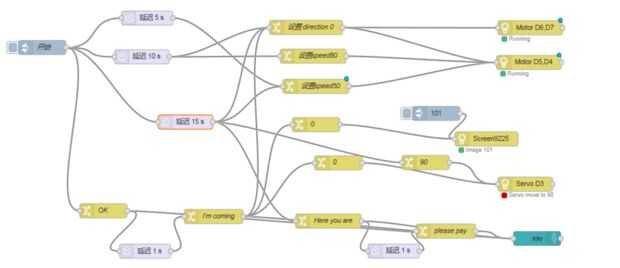
Como se muestra en el diagrama de nodo, pulse el botón de programa, módulos de control de programa de trabajo en varios nodos de tiempo:
A: a 0 segundo, configurar la carga de cadenas: "OK" y "Vengo" a un texto a voz voz módulo de salida;
B: a 5 segundos, configurar la dirección de cuerdas: 0 motor 1 y motor 2 para controlar el robot se mueva recto;
C: a 10 segundos, configurar la velocidad de secuencias: 80 motor 2 para controlar el robot gire a la izquierda;
D: a 15 segundos,
un). Configuración de la velocidad de secuencias, 50 motor 2 para controlar el robot se mueva recto;
b). entrada cadenas 101 a pantalla LCD para mostrar un código QR
c). configuración de la carga de cadenas, 90 a servo para el control de la puerta abierta
d). configuración de la carga de cadenas, "aquí estás" y "preste" a módulo de salida de voz de texto a voz.
Programación web: http://www.smartnode.io/getstarted/













