Paso 5: Sustitución del eje y endurecimiento



Algos fue 2-2 en el evento, que no es un mal registro para un nuevo robot, sin embargo el sistema de arma simplemente no funcionó. El eje del motor sin cepillo era de acero, sin embargo parecía ser sin templar y había cortado una ranura para un clip E en él cerca de la parte delantera del motor. Esto significaba que cada golpe buen dado lugar a un eje roto y un disco de volar fuera del robot. Después de cambiar varios ejes finalmente dejé de usar el arma.
La pregunta después de que el evento fue como solucionarlo. Decidí tomar un enfoque de dos partes a solucionar el problema. En primer lugar, añado un cojinete para el extremo para dar soporte al eje en ambos lados. En segundo lugar, haré mis propia ejes eran más largos, no tienen un surco, y tratamiento térmico.
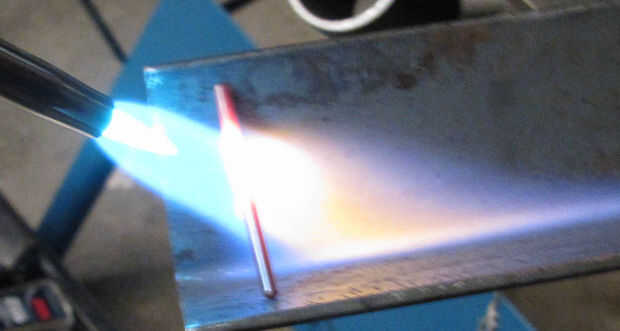
Encontré una buena longitud de herramienta O1 de acero en McMaster-Carr por unos pocos dólares y decidió que era un buen lugar para empezar. Una vez llegado el material, corto longitudes grandes de O1 para permitir que ser lijada para un buen calce en los rodamientos y puede outrunner. Después de revisar mis ajustes, tomé una lata de acero y aceite 30wt basa las sugerencias en el http://hocktools.wordpress.com/2011/01/31/diy-heat-treatment-of-tool-steel/ en el tratamiento de calor DIY.
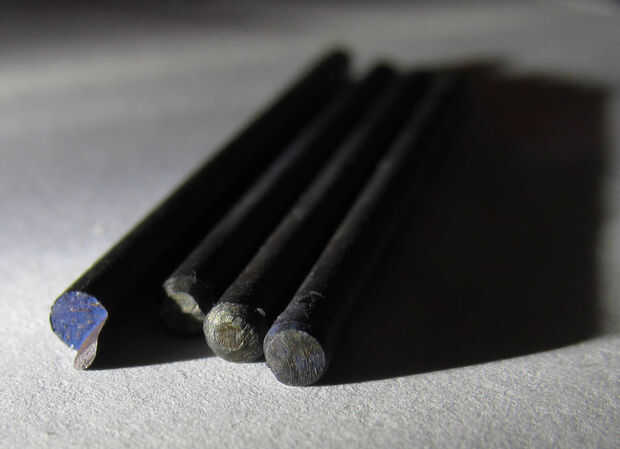
Cada eje fue calentado a un naranja brillante con una antorcha entonces caído a lo largo en el baño del aceite. Después de la limpieza de los ejes una prueba rápida en un pedazo para ver cuán duro el eje había conseguido en relación con una pieza de recocido de O1. El recocido pedazo doblado 90 grados, la pieza endurecida desprendió muy limpiamente. La segunda etapa del proceso era Temple. Los tres ejes y pieza de ensayo se colocaron en una estufa a un lugar entre 450 y 500 grados F y se dejó reposar 45 minutos.
Los nuevos ejes fueron presionados en las latas motor y todo parece estar funcionando bien.


")










