Paso 3: Conecte sus motores
Si usted está usando motores de la C.C.:
Conecte sus motores a tu arduino con un controlador de motor.
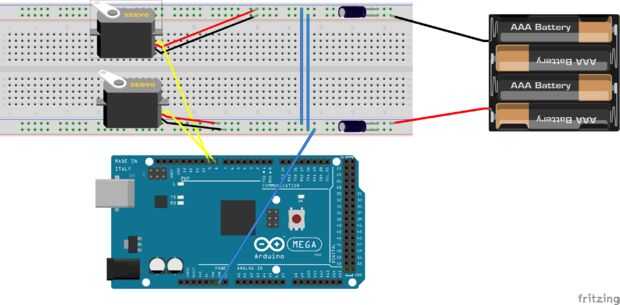
Si está utilizando Servos:
Conecte su primer servo
1) negro cable a tierra de su sostenedor de batería 4xAA (no olvide conectar a esta tierra a la tierra del arduino también)
2) cable rojo en + 5V de su sostenedor de batería 4xAA (poner un capacitor de 470uf)
3) hilo blanco a Digital 9 Pin a tu arduino
Conecte el segundo servo
1) cable negro a tierra de su sostenedor de batería 4xAA
2) cable rojo en + 5V de su sostenedor de batería 4xAA (poner un capacitor de 470uf)
3) hilo blanco a Digital 8 Pin a tu arduino
ahora añadir este código a tu arduino
#include < Servo.h >
Servo leftmotor;
Servo rightmotor;
void setup() {}
leftmotor.Attach(8);
rightmotor.Attach(9);
}
void loop() {}
leftmotor.Write(180); 180 = velocidad máxima en una dirección, 90 = detenido, 0 = a toda velocidad en dirección contraria
rightmotor.Write(0);
}
Ahora deben girar sus servos.
Si usted tiene cualquier problema, deja un comentario y te ayudo
")



")



")


")

