Paso 1: ¿Cómo funciona?
¿Qué es una línea después de robot?
Como el nombre sugiere este robot siga una línea línea negra o blanco.
¿Qué es la lógica detrás de esto?
Este robot sigue la lógica de la superficie opaca y transparente, generalmente superficie blanca refleja la luz y la superficie negra absorbe la luz,
¿Cómo esta lógica se puede utilizar en línea que sigue el robot?
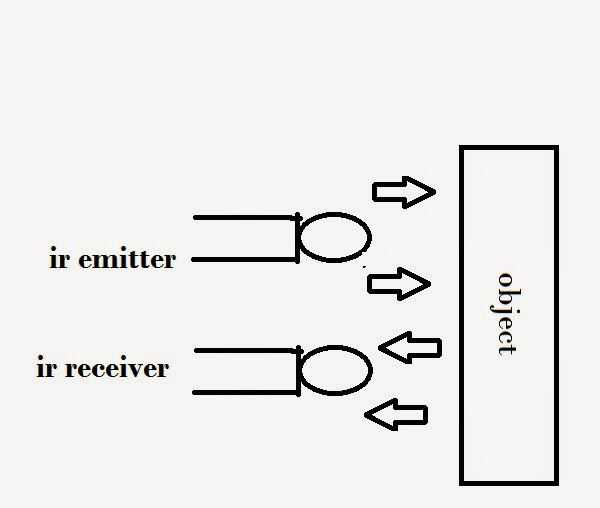
Podemos utilizar un sensor de infrarrojos, su un par de IR Transmisor y emisor, los rayos IR se emite por la emisora y recibido por el receptor, si la superficie generalmente blanca u otro color reflejará nuevamente el sensor y el receptor empieza a receptor de esta forma el sensor producen 5v salida, esta salida puede conectarse a cualquier circuito lógico al motor de la unidad o de otro artefacto , Si el sensor cumple con superficie negra no es refleja los rayos, por lo que la lógica de salida es 0v.
Se trata de una línea simple y barata sigue robot, este robot no necesita programación y puede trabajar sin un microcontrolador, por lo tanto, se trata de un robot para un principiante,
Componentes principales de este robot es el sensor de infrarrojos y ULN 2003A IC
Cuando el sensor IR cae en un reflexivo superficie o blanco superficie se comienza a dar 5v como salida. ULN 2003A es un array de transistores darlington alto voltaje, alta corriente. En este circuito actúa como un interruptor, cada vez que recibe 5v como entrada, el interruptor de salida se abre. Si no hay ninguna entrada, el interruptor se cierra.
Cuando el sensor de infrarrojos produce 5v como salida, el pin de salida del sensor de infrarrojos está conectado con la clavija de entrada de ULN 2003 IC, por lo que el motor comienza a funcionar, si no hay ninguna salida, el motor se detiene.




")








