Paso 4: Lógica
CASO 1
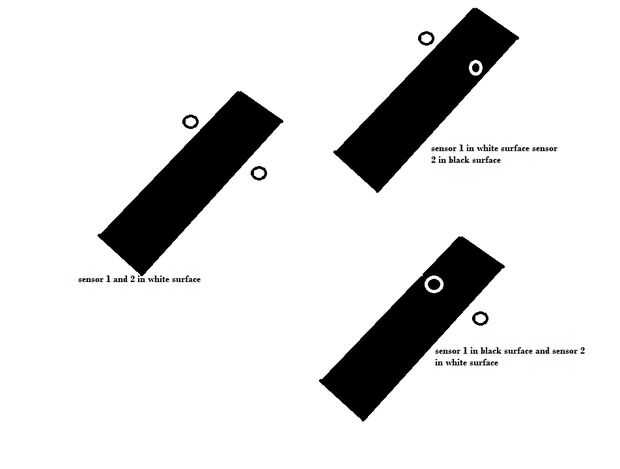
Cuando sensor 1 y 2 en superficie blanca:
En el primer caso ambos los sensores son de superficie blanca o medio reflexivo que da 5v como salida e impulsa los motores izquierdos y derecho.
CASO 2
Cuando el sensor 1 en superficie blanca y 2 en negro superficie:
En este caso sensor 1 esté en la superficie blanca y el sensor producirá 5v como salida y gira sólo un motor, que hace que el robot gire a la derecha.
CASO 3
Cuando el sensor 2 en superficie blanca y 1 en negro superficie:
En este caso el sensor 2 es en la superficie blanca y el sensor producirá 5v como salida y gira sólo un motor, que hace que el robot gire a izquierda.




")








