Paso 12: electrónica
Absolutamente no soy una autoridad referente a electrónica, así que leer todo con una mente escéptica porque las cosas que hice no son probablemente lo mejor. (pero funciona)
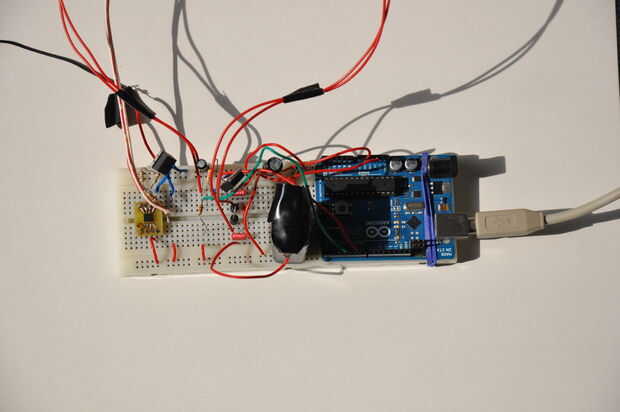
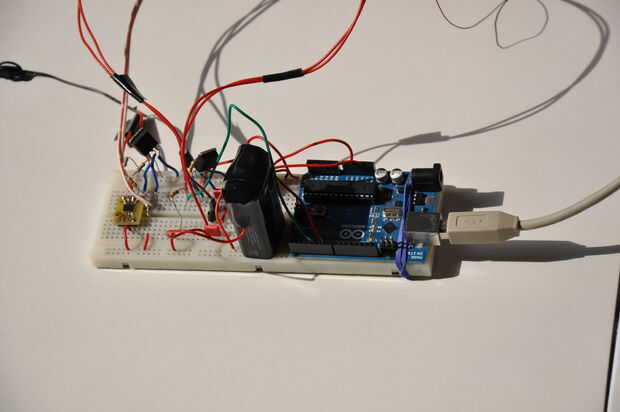
Todas las cosas en el protoboard realmente consta de 3 circuitos simples separados, uno para el LED, uno para encender el motor y un condensador pequeño debounce para manejar el contacto del medidor de velocidad.
Los LEDs
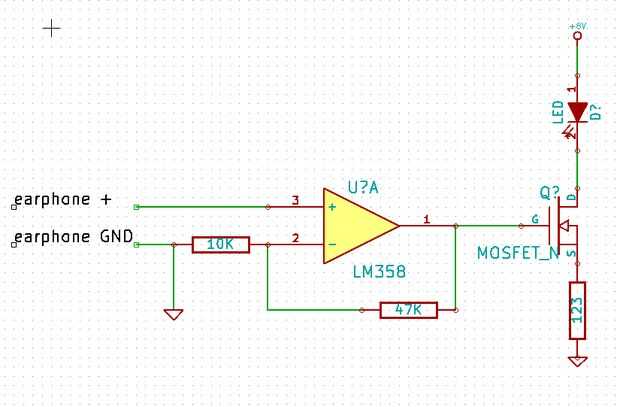
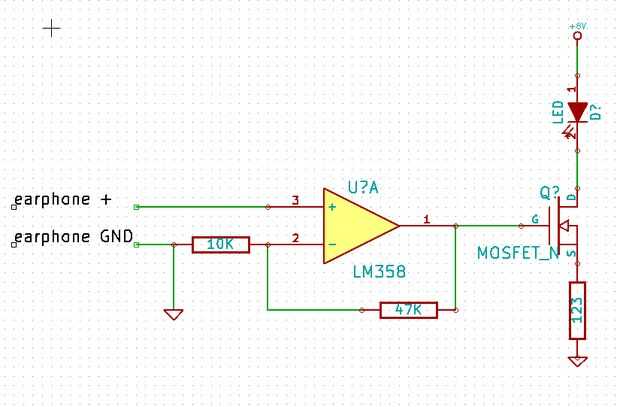
La idea es controlar la corriente para el LED con la ayuda de un MOSFET. El mosfet que uso es un nivel de lógica de N-channel Mosfet de la energía. (un NTB18N06L (rescatados de una fuente de alimentación, son de montaje superficial, por lo tanto, los cables azules conectados a ellos)) El hecho de que es un Mosfet del nivel de la lógica es que puede ser abierta completamente con microcontrolador normal tensión (5 V). En otros MOSFET de potencia es generalmente algo de 20 V.
La señal que sale de un conector de audio es amplificada por no invertir el circuito del amplificador operacional. Este circuito tiene el propósito de ampliar la amplitud de la 'sonido' de 0 a 5 V. Esta señal amplificada entonces va a la puerta del MOSFET donde entonces por consiguiente controla el flujo actual a través del LED.
Pero hay un pequeño problema, fijate en este detalle de la hoja de datos de la NTB18N06L:
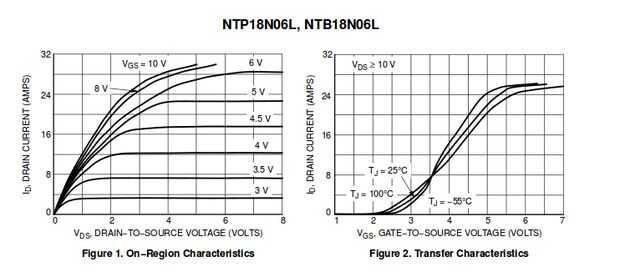
Como se puede ver en la figura 2, el MOSFET comienza realmente apertura de sobre 2V. La primera ~0.7 V se pierde de todas formas porque son de LED y entonces allí es una ~1.3 adicional V perdido porque el MOSFET no abre incluso a un bajo voltaje.
Así que el rango dinámico es de 2-4.5 V.
Es por eso amplificar la señal de un factor 4.7 (un 47 kOhm con una resistencia de 10 kOhm en el circuito de retroalimentación). Junto con algunos ajuste del volumen de la computadora portátil puede obtener las más importantes fluctuaciones en ese punto.
El resultado de esto todo es entonces que las manchas oscuras será totalmente negras y algunos de los lugares más brillantes será totalmente rojas.
(O podría usar más y complicater electrónica para obtener un mejor resultado) o algo simple no pienso.
A continuación es un esquema del circuito usado para alimentar los LEDs. Cuidado, este es un circuito mal y muy unefficient. (leer el comentario después de este cuadro)
Como se sugiere en los comentarios, una mejor solución sería utilizar la retroalimentación. Mira el comentario realizado por el Sr. ccrome para su esquema. Este es uno de ellos estas soluciones hermosas que yo he faltado totalmente. Habría permitido mucho mejor gama de claro-oscuro.
El motor
Esto es quizás algo que había que hacer también de manera diferente.
El esquema que utilicé se puede encontrar en un tema del foro en el que se le preguntó cómo conducir un calentador de motor. Alguien muestra un esquema en que alguien de respuestas que va a funcionar bien. Y eso es lo que hice.
Como fuente de energía utilizar una pila de 9V normal.
Pero ten cuidado con los que una vez había cableado lo incorrecto y mi portátil se cayó hacia fuera. Por suerte no hay nada roto, pero ten cuidado.
Sin embargo, con pwm, solo tienes 256 pasos para la salida y esto es quizás un poco demasiado grueso para controlar con precisión la velocidad del motor.
En segundo lugar el hecho de que es ancho de pulso había modulado significa que existe un pulso. Y el motor es atornillado a un gran disco de cartón. Así, junto a ser un disco de spinning es un altavoz que emite un molesto tono ruidoso.
Ver en el siguiente paso cómo se controla la velocidad del motor.
El contacto de rotación
Esto es más simple, es simplemente un tirón para arriba resistencia (10k) y un condensador del debounce en uno de los cables del 'detector' y otro conductor conectado a tierra.
Por lo tanto, cuando el aluminio sobre el disco toca los dos cables, se hace contacto que tira hacia abajo de la entrada digital de arduino que se puede leer.
Es simplemente un interruptor. (Fijate en esta página sobre cómo debounce un interruptor para ver un esquema)













