Paso 3: Cómo un Servo funciona
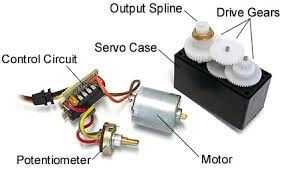
"Servos son controlados mediante el envío de un pulso de ancho variable. El cable de la fuente se utiliza para enviar el pulso. Los parámetros de este pulso son que tiene un mínimo pulso, un pulso máximo y una tasa de repetición. Teniendo en cuenta la rotación de las limitaciones del servo, neutral se define como la posición donde el servo tiene exactamente la misma cantidad de potencial rotación en sentido horario, como lo hace en la dirección contraria. Es importante tener en cuenta que servos diferentes tendrán distintas limitaciones en su rotación pero todos tienen una posición neutral, y que posición es siempre alrededor de 1,5 milisegundos (ms).
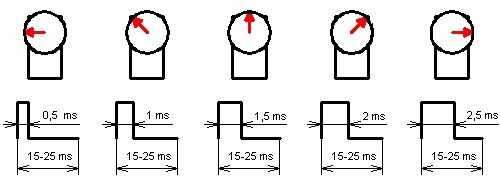
El ángulo se determina por la duración de un pulso que se aplica al alambre de control. Esto se denomina ancho de pulso modulación. El servo espera ver un pulso que cada 20 ms. de longitud del pulso determinará hasta qué punto el motor gira. Por ejemplo, un pulso de 1,5 ms hará que el motor gire a la posición de 90 grados (posición neutral).
Cuando estos servos se manda a mover se mueva a la posición y mantenga esa posición. Si una fuerza externa empuja contra el servo, mientras que el servo tiene una posición, resistirá el servo se mueva de esa posición. La cantidad máxima de fuerza que puede ejercer el servo es la tasa de esfuerzo de torsión del servo. Servos no mantendrá su posición para siempre aunque; el pulso de posición debe repetirse para el servo en posición.
Cuando se envía un pulso a un servo que es menos de 1,5 ms el servo gira a la posición y sostiene su eje un número de grados en sentido antihorario desde el punto neutral. Cuando el pulso es mayor a 1,5 ms ocurre lo contrario. El ancho mínimo y el máximo ancho de pulso que se mando el servo para que gire a una posición válida son las funciones de cada servo. Diferentes marcas y diferentes incluso servos de la misma marca, tendrá mínimos y máximo diferente. Generalmente el pulso mínimo será de 1 ms amplia y el pulso máximo serán 2 ms amplia.
Otro parámetro que varía de un servo al servo es la velocidad de giro. Este es el tiempo que tarda desde el servo para cambiar de una posición a otra. El peor tiempo de torneado es cuando el servo está llevando a cabo en la rotación mínima y es mandado a ir a la rotación máxima. Esto puede tomar varios segundos en servos del esfuerzo de torsión muy alto". Información proporcionada por la ciudad de servo



")









