Gescudo de Arduino de propósito general para autoequilibrarse máquinas.
¿Por qué hacen?
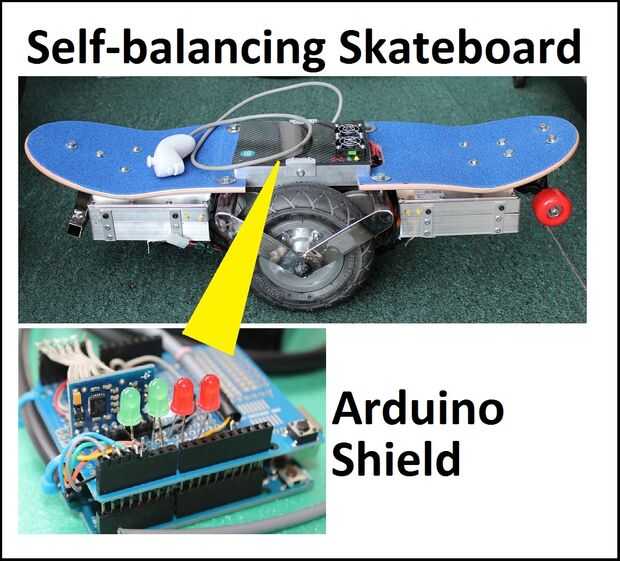
Previamente hice un Instructable en 2010 sobre cómo construir un monopatín uno mismo-equilibrio.
Hay > 500 comentarios en este y muchos expresan creación de confusión los sensores de equilibrio, software y electrónica. Además de eso, la de salida analógica unidades de medición inercial que estaban comúnmente disponibles dejó de hacerse.
Aquí, he tomado un oscuro precio IMU analógica que actualmente todavía se hace en China, que está disponible en ebay y utiliza un prototipado Arduino "escudo" Monte todos las partes, incluyendo un cable a un controlador de mano básico (para la dirección y ajuste el punto de equilibrio) y un cable con solo 2 cables que se conecta a un controlador de potencia del motor 2 x 25Amp "Sabertooth". En esencia un reorganizar completa del sistema de control, lo que es más sencillo de construir al mismo tiempo.
He intentado hacerlo lo más fácil y en particular, no confundir como posible construir.
Nota de diciembre de 2013: Incluso éstos están recibiendo ahora raros pero sólo he encontrado la serie de "Arboleda" de sensores analógicos de Seedstudio y añadido los datos de contacto en la página 6.
Nota (marzo de 2014): por fin he hecho algo similar a este que realmente funciona con un IMU DIGITAL moderno de Sparkfun, el sensor 6dof, código No: SEN-10121. Tiene su propio Instructable nuevo aquí:
Nota (diciembre de 2014): También he hecho un Instructable usando el mismo digital Sparkfun IMU en moto uno mismo-equilibrio. Este instructable es más actualizada y tiene el diagrama del circuito y el código más reciente aquí:
He incluido los conceptos básicos de cómo conectar esto con el regulador de potencia del motor de Sabertooth, que es una el regulador de la energía útil robot comercial, como la Sabertooth de la energía y cómo conectar los motores a ella. Para una explicación muy detallada de la parte mecánica de la construcción, mira mi Instructable original de 2010, en la parte superior de esta página de introducción.
Un giroscopio se utiliza para equilibrar (filtro complementario con un acelerómetro). Otro giroscopio mide la tasa de rotación lateralmente (por ejemplo, cuando la dirección).
Esto proporciona otra característica útil para libre; Cuando se ejecuta en línea recta, si detecta rotación superior a 10 grados por segundo lateralmente, cambiará potencia a los motores para resistir este efecto. Por ejemplo, los motores tienen diferentes fricción así que cuando usted lento a una parada, se detiene antes que el otro y spin off. Esta función deja que eso suceda y significa que pueden montar las ruedas muy juntas.
Ver este video http://www.youtube.com/watch?v=FEaTxahyQxc ver este suceso en minutos 0,51, el giro libre se utiliza para reducir este efecto.
Nota: Añadido 15/03/14. Para aquellos que pueden manejar a uno de los antiguos, ya no está disponibles, de Sparkfun 5dof analógico IMU, sólo he adjuntado el mismo código escrito en este Instructable para IMU chino, con el paso de 30 pero con las ganancias para el giro a la vieja 5dof analógico Sparkfun IMU.
Lista de partes principales
número de parte www.Maplin.com GBP US$
N39KR RockerSwitch 2.39 3.62
N39KR RockerSwitch 2.39 3.62
GW72P Microswitch con palanca 2,49 3.77
FH04E Sub-Min interruptor 2,79 4.23
Proyecto caja de 3,79 5,74
9 XR27E forma multicore cable 5,14 7.79
2 base cable 0,99 1,50 blindado
N30KU Arduino Uno 24.99 37.86
N35KU Arduino protoshield 14,99 22,71
IMU analógico 5DOF 17,81 26.99
Nota: lista de los vendedores de este actualizado 25 de agosto de 2013 (ver paso 6 de la lista)
4 x 2,56 3,88 LED
_________________________________________________________
80.33 121.71
Clip de vídeo
Video del último uno mismo-equilibrio del patín en acción mediante este IMU y código







")

")



