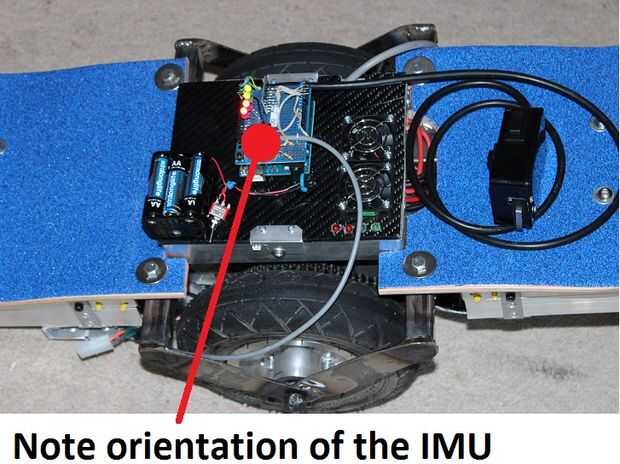
Paso 28: Orientación de IMU y escudo en su máquina
Sólo errores aquí no puedo controlar son la forma de alambre sus motores.
Regla es que si usted inclina tablero unidireccional, ambas ruedas deben comenzar en dirección que se ha inclinado hacia. es decir, si el extremo izquierdo del tablero es hacia abajo, luego ruedas deben moverse junta a izquierda (para contrarrestar esto y traer a bordo otra vez). Es fácil tener un motor con cable nuevo al frente por ejemplo en cuyo caso hacer lo correcto, pero maneras opuestas de la vuelta y así sucesivamente.
Pruebas iniciales sostienen tarjeta firmemente en cada extremo, con las ruedas en el suelo pero ser listo para levantar la tabla en el aire y lanzamiento hombre muerto si vuelve loco.
-Punta de uno de los extremos en la tierra de la máquina y no lo mueva.
-Girar sobre Arduino.
-Encienda Sabertooth.
-Espere 1 LED para iluminar.
-Prensa en deadman interruptor.
-Esperar para todos los 4 LEDs a la luz, ahora todo ha cero y está listo para ir.
-Llevar lentamente el nivel de la máquina. Cuando el nivel se activará el código de uno mismo-equilibrio.
-Para los primeros segundos el aumento será bajo y se sentirá "fofo" en términos de calidad de conducción.
-Después de unos segundos la ganancia aumenta automáticamente. Esta es la función "arranque suave".
-Si se suelta el interruptor de hombre muerto de toda la energía se reducirán en 0,5 segundos.
-Utilice el interruptor de eje de balancín de fine-adjust a la posición de equilibrio de afinar si no es bastante nivel.







")

")



