Paso 29: Ajuste de las variables en el código
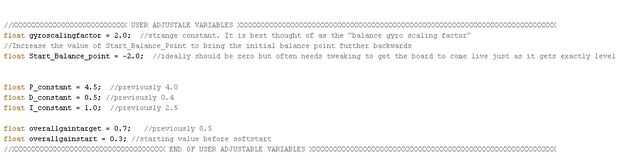
Tiene P, I y D valores de controlador PID clásico.
Los valores que he elegido son por ensayo y error y traje mi máquina.
El overallgaintarget es el valor de las rampas de ganancia hasta en los primeros segundos después de que primero traen nivel.
Por lo tanto para un sistema taughter aumentarlo (demasiado y la máquina oscilará violentamente). Para una calidad de conducción "mushier" luego reducirlo un poco.







")

")



