Paso 2: El chasis

Como se puede ver en la imagen, el chasis tiene la hoja del plexiglás atornillada sobre él. Para hacer esto usted necesita doblar el plexiglás en ángulo recto. Afortunadamente tengo un sistema de hilo caliente para hacerlo en el trabajo pero es posible utilizar una pistola de calor utilizadas para remover la pintura de las paredes! Debe ser rápida y práctica sin embargo, de lo contrario obtendrás la forma equivocada. Entonces sólo algunos agujeros y fije el motor al chasis. Si no desea utilizar este enfoque entonces podrá colocar todo encima de la otra como han hecho otros. Lo que hace, mantener el giro como cerca de la mitad del árbol como sea posible y recostarla con las clavijas que se pega para arriba. No monte el giroscopio mitad de camino o se producirá un error con sus lecturas. No puse la varilla del péndulo de aluminio en al principio - sólo se celebra en unos agujeros y abrochar con bridas (zip-ties). En lugar de la hoja del plexiglás puede usar una caja de plástico tal vez si usted puede encontrar uno el ancho adecuado. Aquí está un video instructivo sobre cómo doblar del plexiglás.
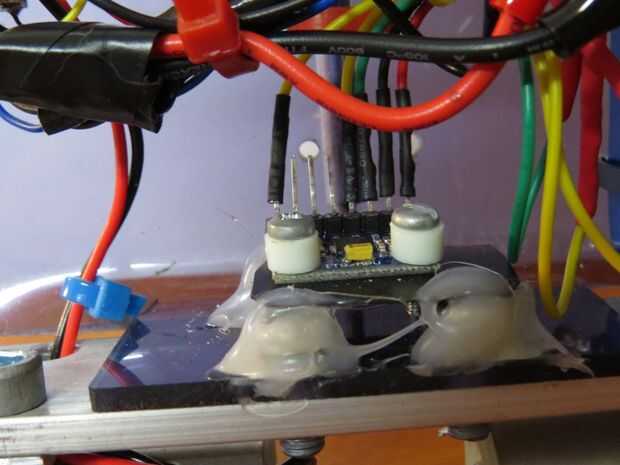
Una vez construido el chasis no contaba para solo conectar todo y probar el sistema completo. primero necesitará probar el control del motor vía el puente de H por cuenta propia - no Gyro (usando la Arduino) y luego prueba el giro con el Arduino observando la inclinación en tiempo real - y no motores. El cableado será igual a la Arduino cuando no hacemos el péndulo completado necesidad de volver a cablear.







")

")



