Paso 3: Control de motores mediante PWM - ningunas conexiones del girocompás
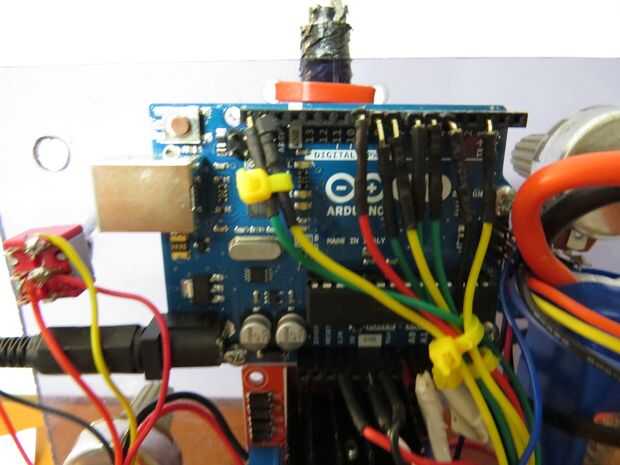

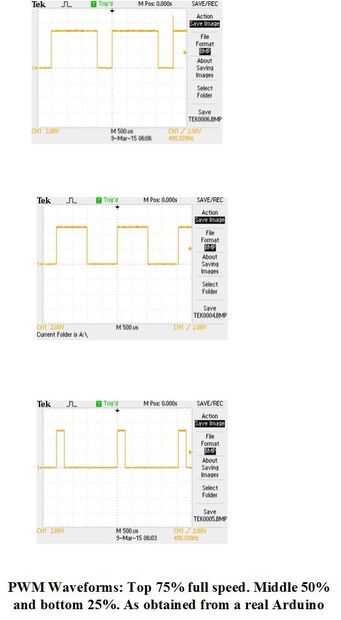
Así que inicialmente tiene que montar el Uno y el puente H L298. Sólo algunos agujeros y fijar por medio de separadores y tornillos pequeños si quieres. Porque es un forro de plástico no necesita preocuparse sobre el aislamiento. Había montado Uno en la parte superior y el puente H por debajo de ella. La batería se lleva a cabo por ataduras de cremallera. Originalmente usé una fuente externa para hacer las pruebas iniciales. Me sugieren alambre el L298 puente a los motores de dc y hacer algunas pruebas primero. Los motores están impulsados por formas de onda PWM. En el diagrama anterior se muestran las formas de onda que salen de la Arduino. El Arduino no puede conducir un motor directamente para que este PWM conduce un controlador de puente H para intensificar la tensión y aumentar la conducción de corriente. Algunos puentes de H tienen dos entradas lógicas - uno se mantiene alto y la otra baja para el avance y lo contrario para retroceder. Este es el caso para el que utilizamos aquí. Otros tienen lógica interna y usan alta/baja para el avance y retroceso. El comando analogWrite (pin, número de 0 a 255) da la fuerza de la PWM que esencialmente cuando un promedio hacia fuera nos da un componente de la c.c. que varía de 0 a un máximo 255 para máxima velocidad!! Por ejemplo con analogWrite(10,255) escribe max PWM al pin 10 (que es sólo dc 5v), analogWrite(10,128) da 50% de velocidad al pin 10 y analogWrite(10,64) da velocidad de cuarto. PIN 10 tendría que ser conectado a la entrada PWM de su puente en H. Consulte los diagramas de forma de onda.
Lea esto primero
Vamos a utilizar el voltaje de 5V regulada después de la salida para los potenciómetros.
Siga el tutorial de motores de corriente continua por John Boxall
http://tronixlabs.com/news/tutorial-L298N-dual-MOT...
Siga sus conexiones que vamos a utilizar en nuestro programa.
Luego ejecutar su ejemplo y comprobar que ambos motores giren en la misma dirección! Si no entonces invertir la polaridad de uno de los motores que ofende. Me incliné mucho de su tutorial de Arduino.
Las conexiones son las siguientes:
Arduino---> L298 puente en H
D10---> 7
D5---> 12
D9---> IN1
D8---> IN2
D7---> IN3
D6---> IN4
Además de las conexiones del motor.
No olvide conectar cero voltios de la Arduino a los cero voltios en el puente de H. De hecho el conector de cero voltios en el tablero del puente H se convirtió en algo lleno de gente y terminé soldar todos juntos para que sean robustos.
Su programa de demostración es la siguiente. Asegúrese de que funciona primero antes de continuar a la parte de giro.







")

")



