Paso 5: Pruebas y ajustes
No se olvide: los motores pueden ser de gran alcance! Asegúrese de que el juicio se realiza en una zona amplia y segura para no causar daños o lesiones. Se recomienda usar almohadillas de protección y un casco.
Importante debe proceder paso a paso. Comience por programar el Arduino (descarga el código fuente), luego verificar la comunicación con los sensores y después con el puente en H. La Arduino Terminal se puede utilizar para depurar y comprobar el estado de trabajo. Por ejemplo, las ganancias PID deben estar sintonizadas porque depende de la proprietries mecánica y eléctrica motor.
Las ganancias pueden ajustarse con este método típico:
1. Kp es principalmente para el equilibrado. Kp de aumento hasta el equilibrio se convierten en inestables, Ki y Kp son 0. Reducir Kp un poco para conseguir estable otra vez.
2. Ki es para la aceleración/desaceleración por la inclinación. Aumento de Ki para obtener la aceleración correcta para no caer al inclinar hacia adelante, Kp sigue siendo 0. El equilibrio debe ser ahora es estable.
3. Kd se utiliza para compensar la integración y conseguir otra vez un establo el equilibrio.
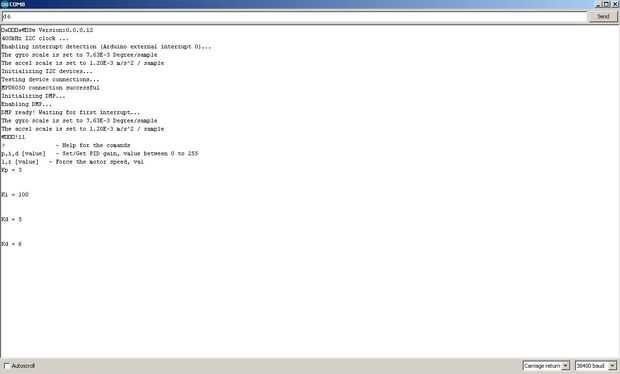
En Terminal, usted puede obtener los diferentes comandos con el comando "?".
________________________________________________________________________________________
? -Ayuda para los comandos
p, i, d [valor] - Set/Get PID ganancia, valor entre 0 y 255
r [valor] - fuerza la velocidad del motor, valor entre-127 a 127
v - versión de software
________________________________________________________________________________________
Con el comando "p" se obtiene Kp. Con el comando "p 10", se establece el PK 10.
Una vez que el controlador Arduino es alimentado, se inicializan los sensores y finalmente se alcanza el estado de espera. Presionando el botón de señal al controlador la SBPT tiene preparado por conseguir la posición vertical activando el dependiente motores hacia adelante o atrás de la posición inicial. Desde este punto, este botón tiene lugar lo contrario los motores están apagados y el controlador se remonta en el estado de espera. Al llega a la vertical, el controlador está esperando la señal del interruptor de límite "Jinete cargado", normalmente presionado por los pies cuando se consigue en la plataforma. Cuando esto ocurre, el algoritmo de balanceo se lanza y activará los motores hacia adelante o hacia atrás para permanecer en posición vertical. Inclinarse hacia adelante va a crear un movimiento hacia adelante y viceversa. Mantenga inclinada aumentará la velocidad de movimiento. Que se inclina en el lado opuesto de la propuesta disminuirá la velocidad. Acerca de la dirección izquierda o derecha, simplemente mueva la palanca en la dirección deseada.







")





