Paso 26: Código: creación de la biblioteca FreeSix IMU en su computadora
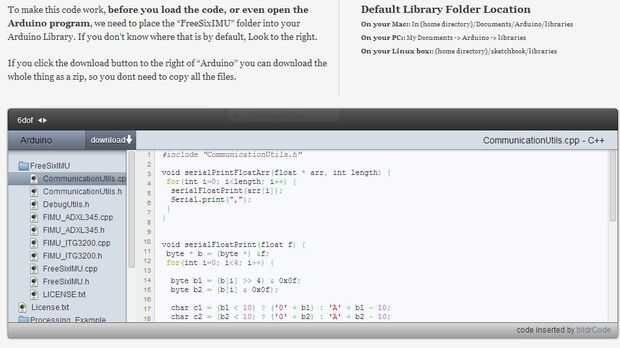
Descargar la carpeta "FreeSixIMU" de este sitio web y poner toda la carpeta en la carpeta de las bibliotecas de Arduino tan luego las bibliotecas mencionadas anteriormente se pueden acceder por el Arduino.
Instrucciones sobre cómo descargar esta carpeta y colocarlo en la carpeta de las bibliotecas de Arduino pueden encontrarse aquí en este sitio web (Desplácese hacia abajo de la página hasta la mitad):
http://bildr.org/2012/03/stable-Orientation-digita...
Esta librería de Arduino fue escrita por Fabio Varesano que lamentablemente murió hace no mucho tiempo. Lee los datos digitales de la IMU y procesa la información de giroscopio y acelerómetro utilizando un filtro llamado "filtro de Kalman" para trabajo qué ángulo de la máquina se inclina en relación con el (siempre vertical hacia abajo) tirón de la gravedad.
Mi granito de arena del código de Arduino (Unido más adelante) utiliza algo que se llama un controlador PID que procesa el IMU balance información del sensor 100 veces por segundo para ajustar la velocidad de cada motor muchas veces por segundo para detener la máquina caída.






")


")



