Paso 11: electrónica




- soldadura de hierro
- destornillador
- tap de 4-40
Materiales de este paso
- 30A brushless ESC (para el motor de la arma)
- batería
- conector de batería
- (2 x) BB-3-9 ESC (para motores)
- Receptor de radio
- interruptor de encendido
El cableado es bastante estándar para un bot de RC:
- Conecte los cables de salida ESC de arma del motor del arma
- Conecte los cables de salida derecho e izquierdo disco ESC a sus respectivos motores.
- conectar los cables de alimentación positiva de todos tres CES y ruta a una pierna del interruptor
- conectar la otra pata del interruptor el positivo del conector de la batería
- conectan los cables de tierra de todas las tres CES y ruta a la tierra del conector de la batería
- enchufe los cables de servo-estilo de los CES en el receptor de radio. Para el receptor que utiliza, son los motores impulsores en los canales 1 y 2 y el arma está en canal 3.
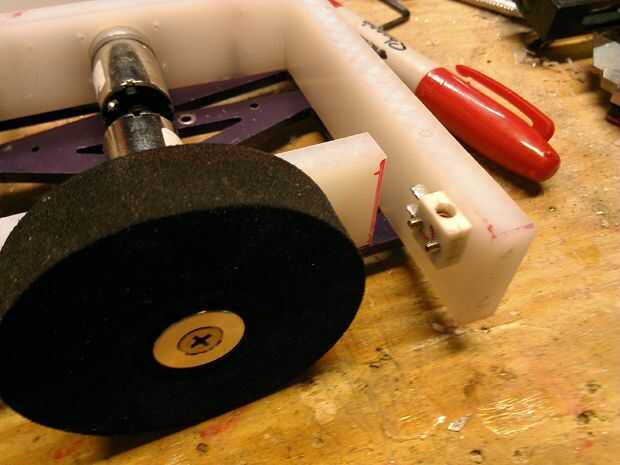
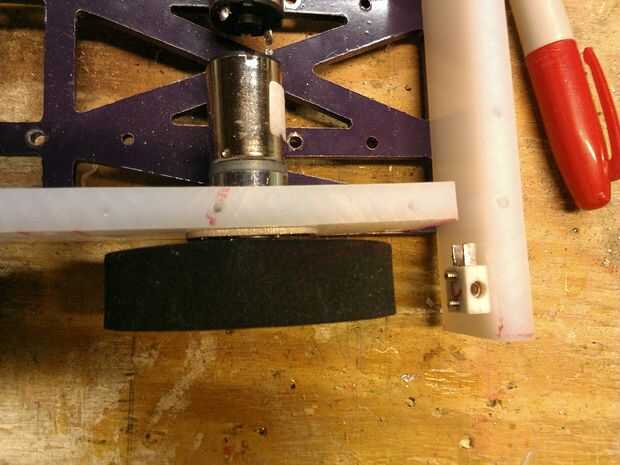
Colocación de interruptor de poder siempre merece algún pensamiento, debe ser accesible al operador, pero no a los golpes de otros bots. Como se muestra en las fotos, he puesto en el interior de la mampara trasera justo detrás de la rueda izquierda. Por sugerencia de Fingertech, aprovechado los agujeros para rosca 4-40, que significó que pude montar sin tuercas.


")







")


