Paso 2: Determinación de pines y protocolo


Búsqueda de documentación
Después de algunos cavar descubrí que buscando en Google "Manual de servicio impresora HP" invariablemente trae documentación bastante decente.
La forma más sencilla de encontrar información pertinente en los cientos de páginas es buscar referencias al "motor" y luego ir de allí.
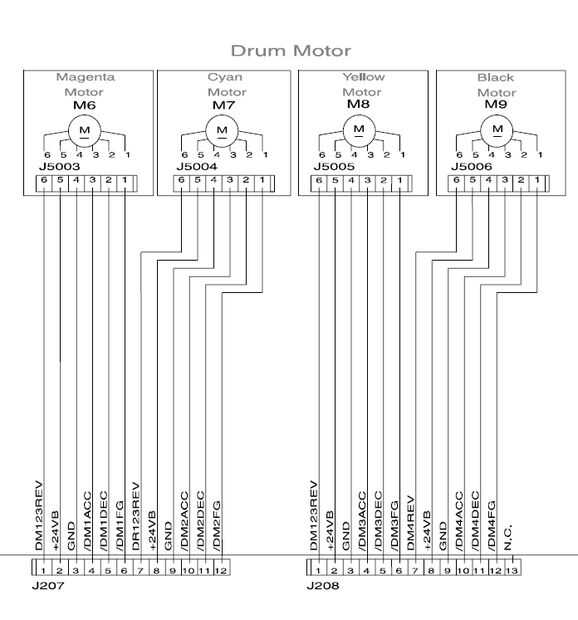
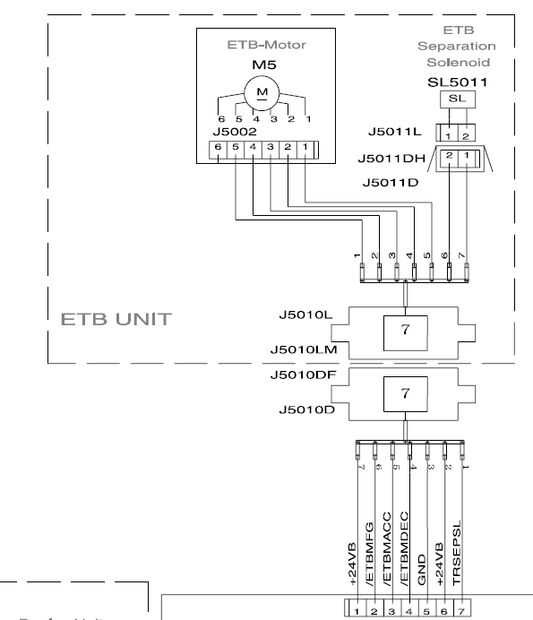
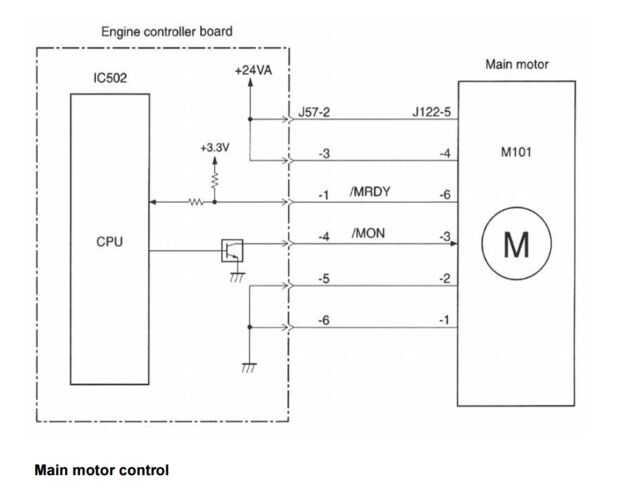
En las imágenes he adjuntado algunos diagramas que saqué de los manuales de servicio.
Descifrando la documentación
Las señales de control son bastante simples (estoy usando lógica de 5V, que parece feliz con), esto es lo que pude encontrar leyendo la documentación y productos para internet.
- / ACC requiere un PWM para control de velocidad
- / DEC es un "freno" (creo que de él como un pin de habilitación)
- REV controla dirección (alta es una forma, bajo el otro)
- FG es una salida, que parece salida de uno (o dos) pulsos por revolución
Recuerda que hay todo tipo de motores, algunos no tienen control de velocidad o capacidad de invertir, dependiendo de su función.
Determinar que cual Pin es cual
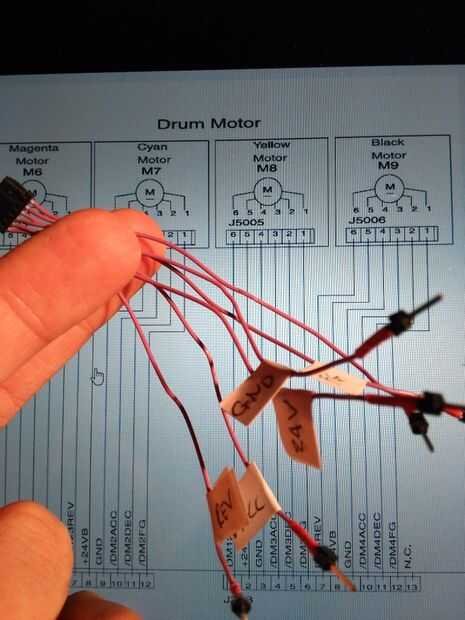
Obviamente el primer paso es metabolizar toda la documentación que puedes encontrar. Me resulta útil para imprimir los esquemas para que yo puedo garabatear notas en ellos.
Lo siguiente es encontrar + 24V y pines GND . Estos deben ser bastante fáciles, normalmente hay un condensador electrolítico a través de las líneas de energía, usted puede mirar el lado con la raya para determinar que es negativo.
Ahora que sabes cuales son estos pines, puede utilizar el diagrama para determinar el resto de ellos. Si no tienes un diagrama, entonces yo intentaría aplicar alimentación de + 24/GND pasadores y tirar el resto baja a través de resistencias de 10kOhm. Vaya a través de cada uno a su vez, tirando a lo alto (+ 5V) a través de un resistor de 10kOhm. Una vez que encuentre el pasador que hace que el motor gire, usted sabrá que ha encontrado /DEC. El siguiente paso sería quitar las clavijas a tierra uno por uno hasta que encontrado el que hizo la parada del motor, que sería más probable ser /ACC.
En este punto tenemos que involucrar a un microcontrolador (salvo que tenga un generador de señal) para colocar un PWM en /ACC y REV para empezar a controlar la velocidad y la dirección.
")

")



 con Arduino")





")