




Bueno, la mejor manera era upcycling 3 roto sillas de ruedas en un trabajo basado en la silla de ruedas robot. Total costo de todo el proyecto: $40 por un Arduino y algunos sensores de ultrasonidos. Llame a su AnnaBot.
Vistazo rápido a partir de hoy: base de la silla de ruedas. Wi-fi habilitado. Cámara a bordo. Todo controlado desde la laptop usando un microcontrolador Arduino. Seis sensores de ultrasonidos están esperando para ser instalado para evitar el obstáculo básico.
Se utilizará Microsoft Robotic Studio de desarrolladores para reconocimiento de voz del programa, la conversación y el comportamiento autónomo, incluyendo «Sígueme» capacidad gesto reconocimiento y uso del sensor Kinect.
Lo primero que hice fue hacer un balance de las partes que podría utilizar que ya tenía alrededor de la casa. Encontré un viejo portátil y una cámara web. Ya estuve jugando con MRDS. Eso me dejó con dos partes a encontrar: una silla de ruedas de trabajo y un microcontrolador para la interfaz.
Me gusta mis gadgets, así que ordené un Arduino Mega 2560 y algunos sensores de ultrasonidos. Sin embargo, mi presupuesto no permite gastar varios cientos de dólares en una silla de ruedas usada. Aquí es donde tengo la creativo.
Hablé con varios hogares de ancianos, un hospital y cualquier persona que escucharía, a lo que yo estaba tratando de hacer. También puse un anuncio en craigslist. Se busca: sillas de ruedas eléctricas, funcionando o no. Basura de un hombre es tesoro de otro hombre. Realmente valió la pena para mí. Durante un período de dos semanas, tengo 3 sillas de ruedas. Ninguno de ellos trabaja. Ninguno de ellos me cuesta un centavo. Tomé el marco y motores de uno, las ruedas y electrónica de otro y pilas y un cargador de la tercera. Puse todos juntos, dijo la palabra mágica y presto, que tenía una silla de ruedas de trabajo y un montón de piezas de repuesto después de unas cuantas tardes de trabajo.
Por lo tanto, la parte más difícil fue reutilizar la electrónica a bordo para el control del motor. Hay un montón de características de seguridad construidos en, y no son fáciles de hackear. Pero están diseñados para manejar la corriente del motor alta. Quería mantenerlos.
Originalmente, tenía la esperanza de interfaz a un puerto en el exterior del controlador, pero esto no era posible. Tuve que hackear el joystick. Otra vez tengo suerte. Puedes ver en la foto del joystick, es solo 4 cables. Un eje, un eje y, además de alimentación y tierra.
Usé un multímetro para medir los voltajes de la palanca de mando en los cables azul y amarillo en neutral, completa hacia adelante, atrás, izquierda y derecha. Luego usé la salida de Arduino PWM darme esos voltajes. ¿Debe haber funcionado, derecho? . Dos problemas. En primer lugar, la electrónica en la silla era lo suficientemente sensible para ver que la tensión era constante y erróneos hacia fuera. He arreglado esto poniendo el PWM a través de lo que yo llamo un "circuito de suavizado". Conecté el PWM a una resistencia, luego a la pata positiva de un condensador. La pata negativa del casquillo fue a tierra. Luego conecté la pata positiva de la PAC para el circuito de control de joystick. Esto vamos a la tapa llevan la tensión en entre los pulsos, y fue suficiente para engañar a controlador de la silla. En el mundo RC, esto se llama un filtro de paso bajo.
El siguiente problema fue una falla de joystick cada vez cambia las direcciones motor. Esto fue solucionado mediante la conexión de bus de tierra de Arduino para el bus de tierra dentro de la palanca de mando. Dándoles una referencia de tierra común resolvieron el último de mis problemas eléctricos.
Actualmente, tengo el Arduino programado para enviar el voltaje adecuado para moverse en cualquier dirección escoger, basado en pulsar una tecla. "8" lo impulsa hacia adelante, invertir "2", queda "4", "6" es la derecha, etc. (las flechas en el teclado numérico). Finalmente, será bajo el control del MRDS.
Los sensores ultrasónicos se van de lo siguiente. Entonces está listo para empezar a ser algo autónomo. Por ahora, me remoto escritorio en el portátil de Ana. Puedo acceder a su webcam para ver lo que está haciendo, y usar a un monitor simple puerto serie para enviar sus órdenes y recibir sus respuestas.
Estoy muy contento con cómo llegó este proyecto juntos. Mucho mejor y mucho más barato que "SAM", el pequeño robot blanco construido en los últimos años 80. Se basó en una computadora de escritorio 80286 que alimentado por batería. Tuvo reconocimiento de voz, webcam y control de joystick. De $500 en dólares de 1987. lol.
Mi siguiente paso es interfaz Arduino a MRDS. Entonces quiero desarrollar algunos sensores de bajo costo acantilado domótica remota basada en la silla y que mejorará la comodidad y seguridad de día a día del usuario de silla de ruedas. A un precio asequible para que aquellos que lo necesitan realmente pueden permitírselo.
Actualización 09/04/2013
Mi Robot de silla de ruedas se convierte en un ROV teleoperados
Hace ya un par de semanas postee algo sobre Anna, mi robot de silla de ruedas estoy usando para la investigación de la tecnología inteligente de la silla. He estado ocupado con obligaciones familiares, pero todavía he podido hacer grandes progresos. Aquí es una actualización muy corto. Voy a intentar añadir un vídeo como puedo conseguir mis manos en una cámara decente! En primer lugar, he encontrado algunos software robótico de la abrir-fuente de Oculus utilizada para controlar sus "netbook basado en" tele-robots. Suerte para mí, su controlador es compatible con el Arduino que estoy usando. He descargado el código fuente de su firmware, hizo algunos ajustes, y ahora tengo el control remoto/tele-funcionamiento del Anna vía wifi desde cualquier conexión a internet en todo el mundo y también a través de una app en mi Iphone. Esto está muy lejos del control de teclado simple de ella que tuve hace unas semanas!
Se trata de un gancho agarrador de la pantalla de mi laptop. Remoto en a Ana que estaba al otro lado de la casa en el sótano y esto es lo que está viendo su cámara. Si puede llegar a leer la pantalla-cuchara, verás tengo velocidad y control direccional de ella, mientras corrientes total videos y audio a mi teléfono o una computadora laptop. El indicador en la parte superior derecha es excelente... estado de la batería, estado acoplado o no acoplado, móviles o no, tiempo de ping (hay un temporizador keepalive que cerrará Anna por razones de seguridad en caso de que las comunicaciones son perdidas) y más. También cuenta con control de pan/tilt una vez me enganche un servo hasta mi cámara.
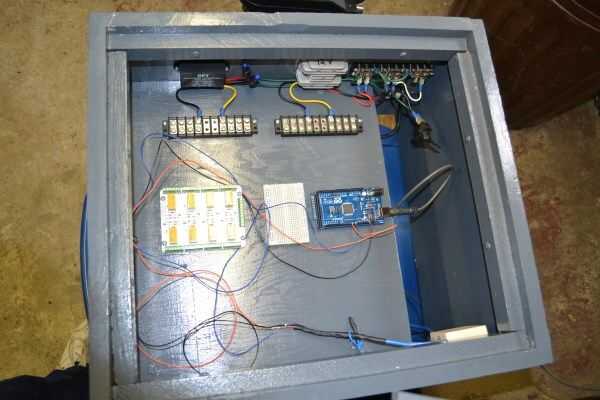
En el lado del hardware, ha progresado, también. Extendido los 24 voltios de las baterías de sillas de ruedas para arriba en su caja electrónica y lanzó en un convertidor de 24 a 12 voltios DC-DC (5 amp) y un convertidor de 24 a 5 voltios DC-DC a 10 amperios. Estos me dará el poder que necesario para el sensor Kinect y mi ultrasonido y sensores infrarrojos, así como algunos servos. Llevé los tres de estos voltajes de salida a regletas de terminales para facilitar el acceso. En el centro de la imagen se puede ver (de izquierda a derecha) un tablero de 8 relés, mi placa de prototipos y su microcontrolador y Arduino Mega 2560. El enchufe del teléfono que puedes ver en el inferior derecho es donde aprovechado joystick/controlador de la silla de ruedas. Si enchufo el Arduino, tengo control de computadora de Anna. Si enchufo un conector de bucle invertido, ella vuelve al modo normal silla de ruedas controlado por su joystick. Lo hice para facilitar el movimiento a su alrededor, y cuando tengo que llevarla en público para demostrar algunas de las tecnologías de seguridad estoy trabajando en.
Y por último, pero no menos importante, poner una plataforma estable en Ana Casa con seguridad y aislar su electrónica. Aunque se ve horrible, mantenerse dentro de mi presupuesto (cero dólares para chatarra madera. jajaja). Una característica interesante a este cuadro es que el marco de la silla de ruedas tenía un asiento reclinable. Por el montaje de la caja entre los soportes de brazo, soy capaz de liberar 2 palancas en la parte delantera de la silla, y la caja electrónica entera levanta hacia arriba y hacia la parte posterior. Esto hace más fácil trabajar en las baterías y otros aparatos electrónicos en su base, y también dobla el espacio que puedo usar para la electrónica porque la plataforma se eleva lo suficiente que puedo montar los componentes en la parte inferior de la tabla que ves en la foto de arriba.
Todavía tengo algunos sensores de ultrasonidos para montar. Entonces voy a trabajar en afinar su software hasta que puedo adquirir una copia de RoboRealm y un sensor de Kinect.
Hasta ahora, sólo tengo $75 invertido (total) en Anna. Que sólo pone mí... oh... $75 presupuesto! jajaja
Gracias nuevamente por leer acerca de Anna! Estén atentos para más aventuras con Anna.













