





EDITED~***************************
Josh Berman y Ellen de Mello Koch como parte de un proyecto final de carrera de ingeniería eléctrica.
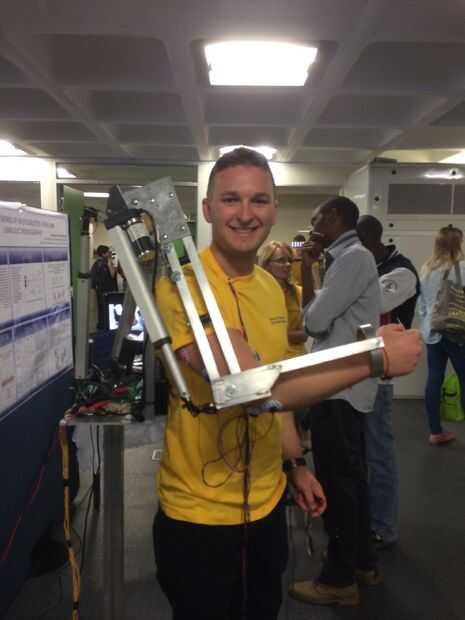
Exoesqueleto:
Un exoesqueleto es la estructura esquelética externa que apoya o protege el cuerpo, en contraste con el esqueleto interno (endoesqueleto) de un ser humano. Este Instructable aborda el diseño y construcción de un soporte de brazo exoesqueleto.
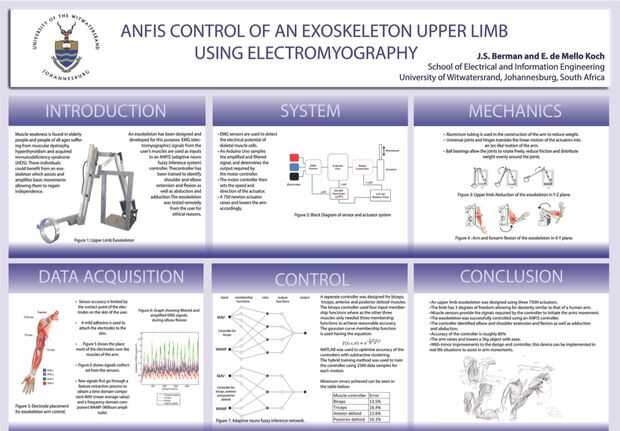
Extracto de mi informe sobre el proyecto "ANFIS CONTROL de un superior extremidad EXOESQUELETO":
"Muchas personas en el mundo están confinadas a una silla de ruedas debido a lesiones o enfermedades que causan debilidad muscular. Una tal enfermedad es una condición genética conocida como distrofia muscular; pacientes que sufren de esto tienen un limitado movimiento de los músculos puede resultar en dolor muscular, hipertrofia muscular y del salón de músculo. Este dispositivo puede dar a esos pueblos su independencia así como la capacidad para funcionar como una persona normal."
Resumen:
El exoesqueleto es un brazo robótico que ayuda el movimiento de los músculos. El usuario conecta los sensores musculares (no invasivo) a la parte superior del brazo y hombro con un adhesivo suave. El músculo los sensores detectan la actividad eléctrica producida por los músculos esqueléticos. El potencial generado por las células del músculo se amplifica y filtra para producir un cambio en el voltaje de entre 0-5 voltios. Esta señal es leída por el Arduino, que evalúa el rango de voltaje y las variables de movimiento del controlador de motor. El regulador del motor determina la dirección y velocidad de los actuadores. Los servomotores son motores de DC con una dirección lineal del movimiento, los motores de subir y bajan el antebrazo y el hombro con un movimiento similar a la de un brazo humano, ayudando así al usuario en su funcionalidad básica.
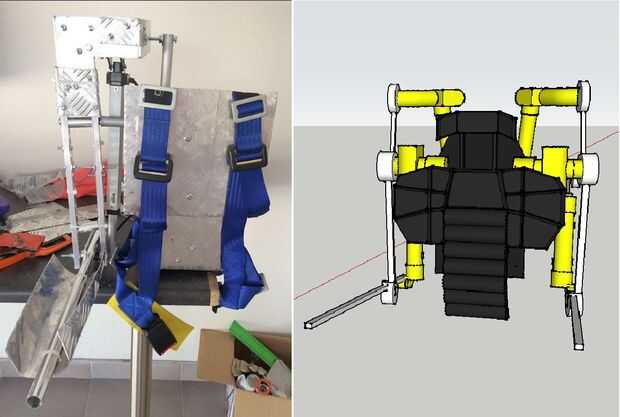
Como costo es una limitación importante, sólo presentaré un brazo con la mínimos requiere actuadores y sensores, ideal * sería 3 actuadores en cada brazo, cada actuador tiene dos sensores musculares. Además, una herramienta de sujeción puede añadirse al final del brazo actúa como una mano.
* Editar * tercer actuador añadido, proporcionando 3 grados de libertad



 barato con trabajo frontal, luces, electrónica")







")

