Paso 1: Materiales de construcción

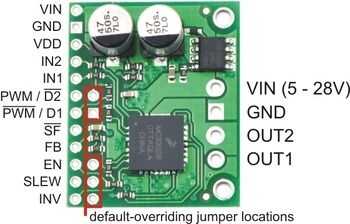


El cerebro del exoesqueleto está formado por un Arduino Uno junto con un chip Dual Motor Driver (edición *** md10a motores controladores utilizados en lugar de controlador doble como resultado de la adición del tercer actuador de 3 chip) que dirige la velocidad y la dirección de los dos de alta velocidad, alta potencia actuadores lineales. Cada actuador tiene 750N de fuerza a 12V. La función de control proviene de los dos sensores de los músculos de sparkfun.
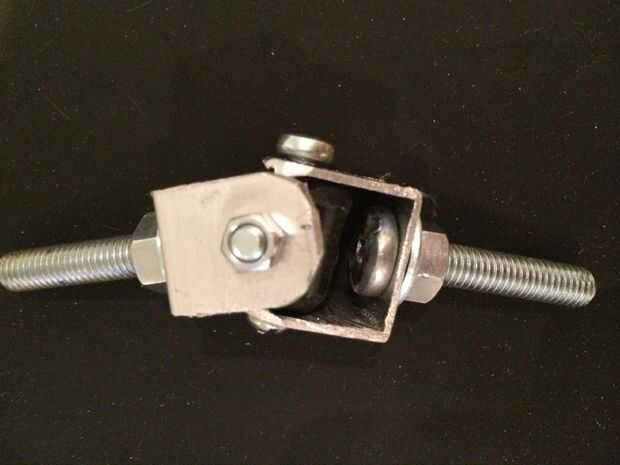
Estructura: Marco de aluminio, actuadores lineales 2 x 750N, paquete de baterías de 12V, baterías 2 x 9V
Microprocesador: Arduino Uno, 2 x módulo de EMG (sensor muscular de Sparkfun V3), controlador de Motor Dual (pololu 12A)
puntos clave:
- Cada actuador es capaz de producir 750N de fuerza, esto es, aproximadamente, 75Kg potencia de elevación. Como los motores son con bisagras y apalancamiento se utiliza para levantar el brazo, este valor es ligeramente inferior.
- Cada actuador sin carga dibuja debajo de 1A de corriente y máximo 5A a plena carga.
- Esto nos permite utilizar una batería de 12V. El exoesqueleto es independiente y no requiere de ' alimentación '. Ni entra ninguna salida eléctrica en contacto con el usuario.
- El brazo puede demostrarse separada del usuario colocando sólo los sensores EMG (estos sensores son una forma de señal de los transmisores, ninguna corriente puede viajar hacia el usuario).



 barato con trabajo frontal, luces, electrónica")







")

