
El TB6612FNG es un controlador de puente H - no entraré en los detalles técnicos de Cómo se trabaja, pero el resultado final es que se puede convertir un motor conectado en cualquier dirección y a una velocidad variable. Esto le permite construir un robot muy ágil impulsado por 2 motores que pueden:
-seguir adelante
-moverse hacia atrás
-girar en un círculo muy apretado por conducir un motor adelante y uno hacia atrás
-una variedad de otros movimientos con velocidades motor diferencial y direcciones
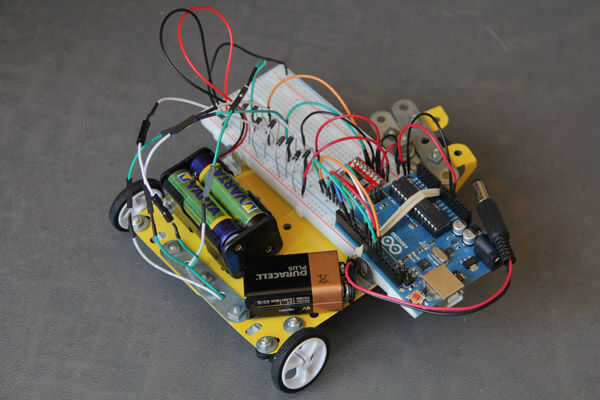
Para mantener este instructable centrado en el conductor, ha construido el bot en un simple cuerpo de Mecano y no han extendido para incluir cualquier detección de obstáculos - el bot sólo conduce a un patrón determinado.
Antes de empezar - especificaciones del conductor:
-Tensión de alimentación lógica (VCC) de 2.7-5.5 VDC
-Tensión de alimentación motor (VM) hasta 15VDC tp
-Corriente de 1.2A constante por canal (3.2A pico)
-Unidades de hasta 2 motores
Imágenes:
1. acabado Robot
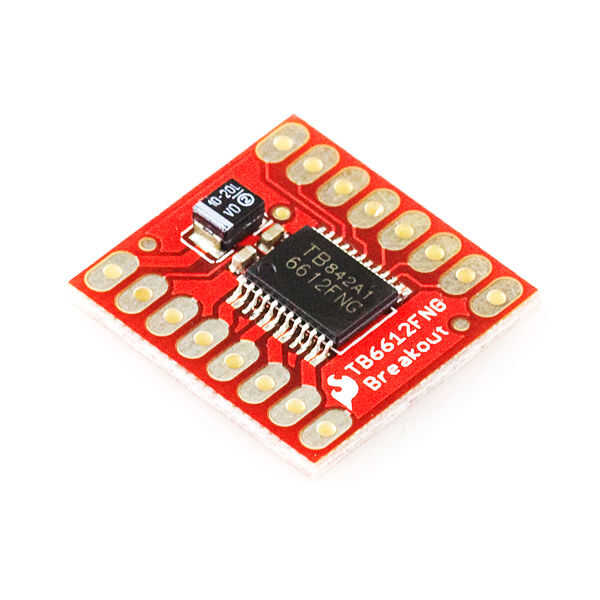
2. la Junta de arranque TB6612FNG
3. el esquema













