Paso 7: Añadir protección EMF trasero

Un diodo conecta el terminal del motor al positivo, el otro diodo conecta el terminal del motor a tierra. Es importante obtener la polaridad correcta, lo conecte como sigue:
-Motor Terminal---> positivo: raya blanca de diodo en el riel de alimentación positiva
-Motor Terminal---> Tierra: banda blanca del diodo a la terminal del motor
Por último, conecte el motor a la placa - en la imagen, el cable blanco.
Repita esto para cada uno de los 3 restantes salidas de motor
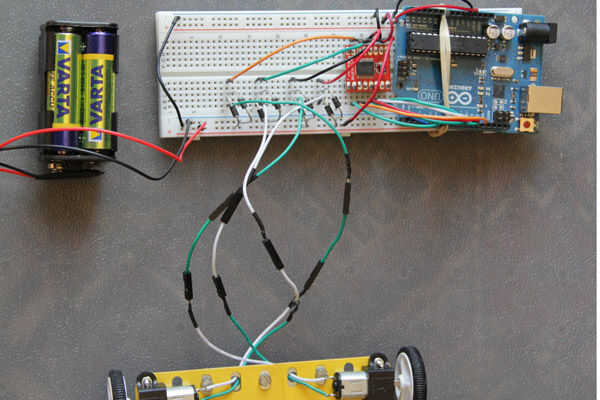
Imágenes:
1. las conexiones de un solo motor terminal
2. pensión completa, que muestra la terminal motor 4 todas las conexiones













