Paso 3: Preparación de prototipos

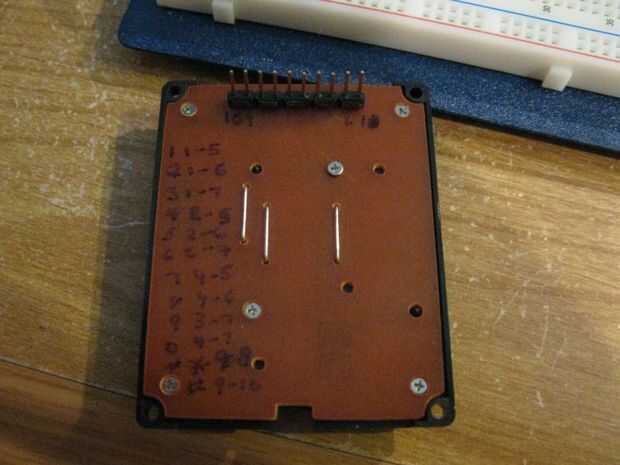
A continuación lo alambré hasta el Raspberry Pi. Los pernos reales que usas no importan, como a incluirlos en el código, que he unido a este paso.
Mi código incluye una lista de las filas:
filas = [26,24,23,22,11]
Una lista de las columnas:
cols = [18,16,15,13,7]
Y una lista multidimensional para las combinaciones de tecla/botón
dígitos = [["1", "2", "3"],
["4", "5", "6"],
["","","9"],
["7", "8", "0"]
["","","","*","#"]]
Por último, hay un bucle de sondeo de las columnas y ver que fila fue empujada:
para col en range(0,lenCols):
Si gpio.input (cols [col]) == False:
Si colsPusehd [columna] == False:
#print str(cols[col]) + "empujado"
activeRow=findRow(cols[col])
Si activeRow > -1:
#print(activeRow,col)
dígitos de impresión [activeRow] [col]
Sleep(0.1)
colsPusehd [col] = True
otra cosa:
Si colsPusehd [columna] == True:
#print str(cols[col]) + "liberado"
Sleep(0.1)
colsPusehd [col] = False













