Paso 1: Cómo Servos son diferentes de los motores regulares
Cuando se utiliza un servo, sin embargo, no controlar torque o velocidad. Por el contrario, puede especificar qué ángulo desea el eje a. En otras palabras, usted tiene control posicional del motor.
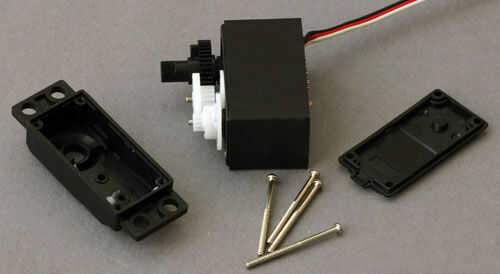
Dentro de un servo es un tradicional motor de la C.C., un potenciómetro (resistencia variable) y circuitos de control. El potenciómetro está conectado al motor que cuando gira el eje del motor resulta también el potenciómetro. El controlador puede medir el voltaje en la patilla central del potenciómetro y obtener una indicación de la posición del eje. El controlador recibe una señal (ver siguiente paso) del usuario que establece una posición deseada. El controlador compara la posición deseada para la posición actual del motor y utiliza esa información para activar el motor en una dirección que minimiza el error.
Esto funciona en la práctica es que especifica al ángulo deseado del eje en el uso de su foto, el eje se convierte en esa posición y luego se mantiene. Cuanto más obtiene empujado lejos de que posición, más difícil intenta dar marcha atrás. Servos de manía son generalmente a camino, por lo que incluso un pilón $15 o $20 uno puede sostener razonablemente bien su posición.





")







