Paso 2: La placa de circuito PWM




http://www.freepatentsonline.com/6731082.html
o
Usted puede visitar wikipedia para una mejor definición de PWM.
http://en.wikipedia.org/w/index.php?title=Pulse-width_modulation&oldid=71190555/
Pero básicamente (como mejor puedo entender) es una velocidad eficiente control de circuito que la tensión de los pulsos y la anchura de la señal al motor y miles de veces por segundo. Esto transfiere más potencia a la carga y desperdicia menos energía para calentar que un controlador de velocidad de tipo resistente.
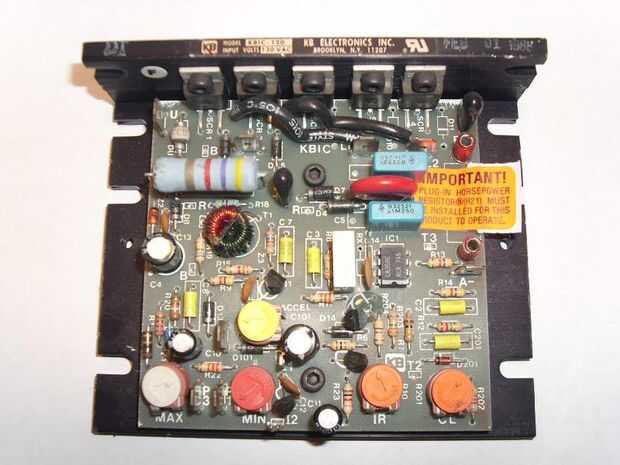
Cepillo de controlador de estilo Trim Pots - situado cerca de uno de los bordes de la Junta. Cada sistema para el motor específico
MIN (Mínimo velocidad-Touch si te atreves) ajuste el "trimpot" MIN puede afectar MAX, puede ser necesario para ajustar ambos hasta deseado se logran niveles
MAX (Máxima velocidad-Touch si te atreves) Tenga en cuenta que puede afectar el ajuste MAX MIN
IR COMP (Compensación de la corriente de entrada-no se tocan) Mejora la regulación de la carga proporcionando fluctuación mínima velocidad debido al cambio de cargas. Si la carga presenta al motor no varía sustancialmente, el ajuste de IR a un nivel mínimo. Excesiva compensación IR hará control a ser
inestable que causa motor cogging.
CL (límite actual-no toque) el Trimpot CL establece la corriente que limita la corriente máxima del motor. También limita la corriente a un nivel seguro de la avalancha de línea AC durante el inicio.
ACCEL (Período de tiempo de aceleración, velocidad 0-full en segundos) Nunca he visto uno en una tarjeta de circuito cinta de correr, solo en comerciales controladores de motor de la C.C. de PWM. Debe haber algo en la placa de caminadora que establece el valor de tiempo... ¿resistencia tal vez?













