Paso 2: lógica
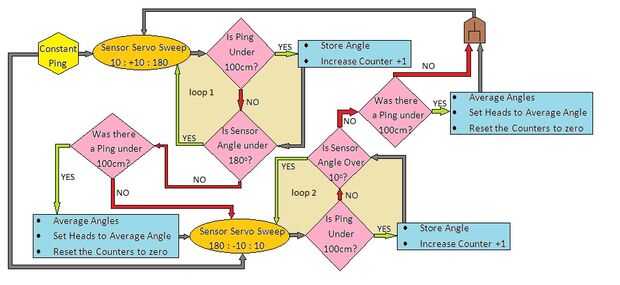
El Sensor del Sonar es ping, y la distancia entre el OVNI y una persona en frente de se calcula constantemente mientras se ejecuta el programa. El Servo de Sonar barre el área frente al OVNI en incrementos de 10 grados.
Si no hay nadie delante del OVNI, no pasa nada y el Sensor del Sonar simplemente arrasa. El programa decide si la distancia detectada es dentro de una ventana declarada, lo que significa que hay una persona en rango útil del proyecto. Si la distancia es la adecuada, el programa almacena el ángulo asociado a la distancia. El Sensor Sonar a "ping" de una persona en múltiples ángulos porque las personas son grandes! El programa agrega todos los ángulos y los promedios. Una vez que se encuentra un ángulo promedio, el programa envía los Servos de la cabeza a ese ángulo promedio. Esto hace que la mirada de cabezas en el centro del cuerpo de una persona y arrastrarse hacia fuera. Si una persona mueve a posiciones frente a los ovnis, el Sensor "ping" en diferentes ángulos, el programa toma un promedio de nuevo y enviar las cabezas para mirar a un ángulo diferente.






")





 - TfCD")
