Paso 1: Cableado del circuito
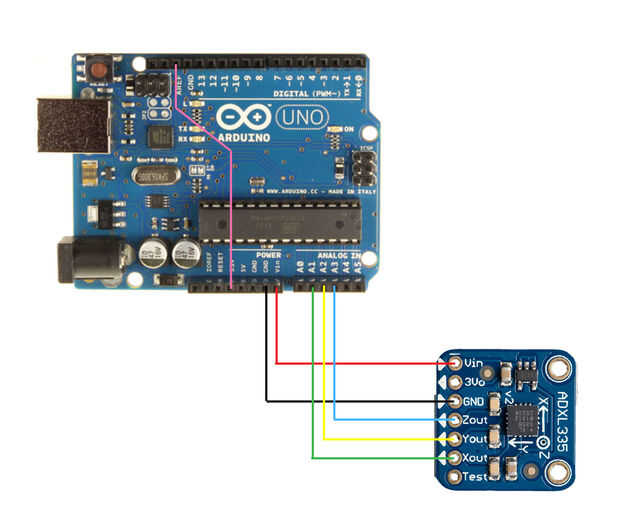
Puede dejar la configuración como esta, pero el análogo de los pernos la gama de Arduino de 0-5V, mientras que las gamas de acelerómetro de 0-3V. Esto significa que sólo utilizará cerca de la mitad del rango de posibles valores analógicos y tendrá menos precisión en sus mediciones. Idealmente, las gamas sería el mismo para que toda la gama de valores analógicos está disponible.
La gama de Arduino puede cambiarse conectando una nueva tensión de referencia al pin AREF y que significa en el código que la referencia analógica es externa (ver paso 2). Me importaba mucho acerca de la precisión, así que sólo usé los 3, 3V en Arduino como mi referencia de voltaje de salida, pero la salida de 3V en el acelerómetro debe trabajar así.
 para registro de datos")






")




 utilizando un Arduino")
