Paso 4: Motor driver y fuente de alimentación
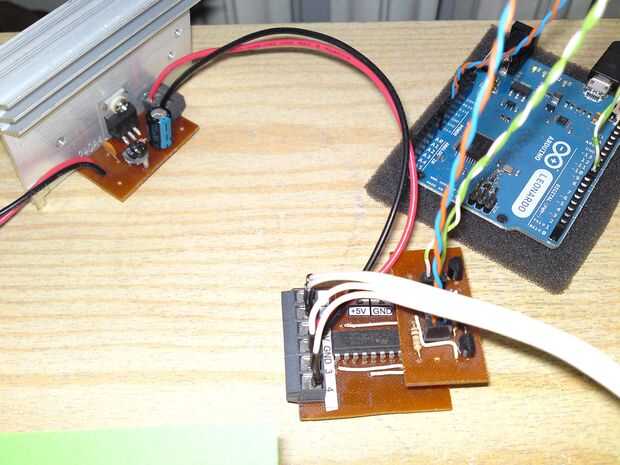
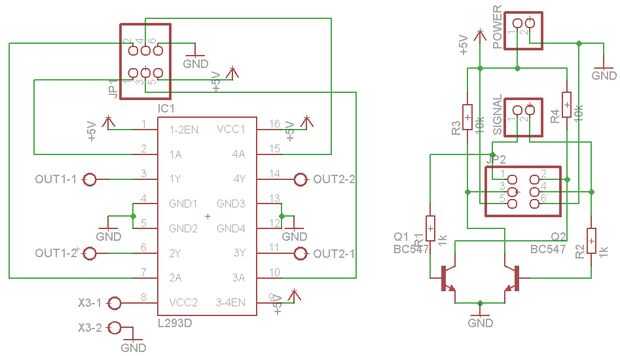
Paso a paso bipolar es conducido por puente en h. Debido a la consumición de baja potencia de paso a paso, L293D es más que suficiente. En la variante más simple, puente en h usa 4 pines de salida digital del Arduino, + 5V y GND. Para reducir salida pines a 2, se puede utilizar tablero pequeño, adicional.
Puede encontrar más información en referencia de Arduino y en la Igoe página de Tom: http://www.tigoe.com/pcomp/code/circuits/motors/stepper-motors/
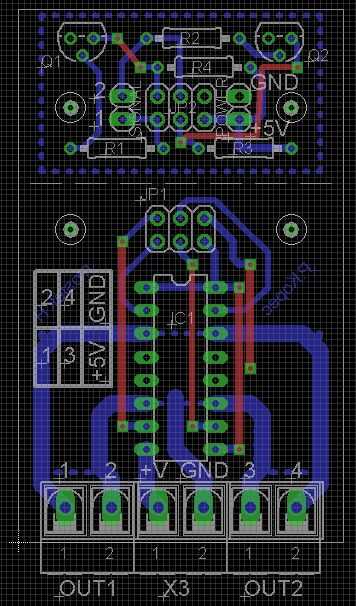
Listo para placas de termotransfer y esquemas se adjuntan a continuación.
Partes:
Parte valor paquete biblioteca posición (mil) orientación
IC1 L293D DIL16 st-microelectronics (700 750) R270
JP1 2 X 03 pinhead (700 1350) R0
JP2 2 X 03 pinhead (700 1875) R0
OUT1 AK500/2-H con-ptr500 (300 150) R0
OUT2 AK500/2-H con-ptr500 (1100 150) R0
ENERGÍA 1 X 02 pinhead (950 1875) R90
Transistor Q1 BC547 TO92-npn (275 2175) R180
Transistor Q2 BC547 TO92-npn (1125 2175) R180
R1 1 k 0207/10 rcl (425 1700) R0
R2 1 k 0207/10 rcl (750 2175) R180
R3 10 rcl k 0207/10 (975 1700) R0
R4 10 k 0207/10 rcl (800 2050) R0
SEÑAL 1 X 02 pinhead (450 1875) R90
X3 con AK500/2-H-ptr500 (700 150) R0
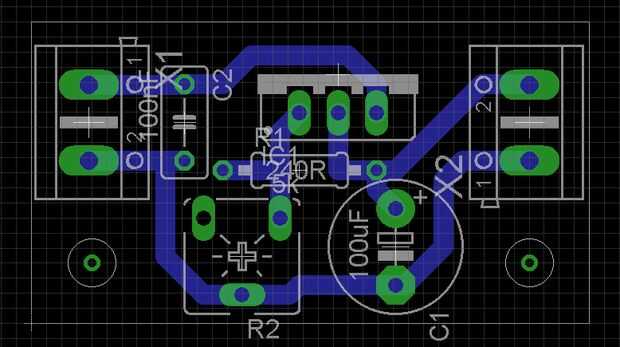
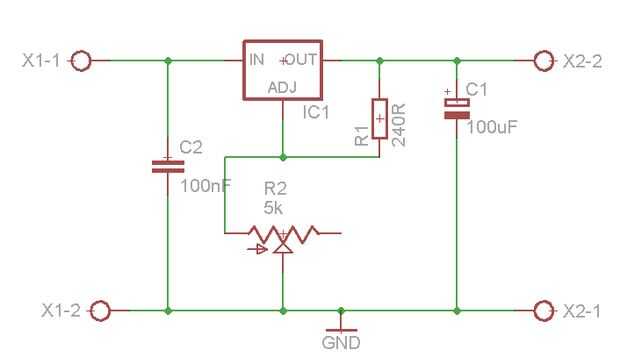
Fuente de alimentación:
Fuente de alimentación para paso a paso es super sencilla aplicación del LM317. Esquema puede encontrarse en la hoja de datos. Mediante el potenciómetro, puedo configurar voltaje al nivel necesario (3, 7V en mi caso).
Partes:
Parte valor paquete biblioteca posición (m) orientación
C1 100uF E5-8,5 rcl (24,13 5.08) R270
C2 100nF C050 - 030 X 075 rcl (10,16 13.335) R270
IC1 317TS v-reg (20,32 16.51) R0
R1 240R 0207/10 rcl (17,78 10,16) R0
R2 5k CA6V pote (13,97 4.445) R180
X1 con-ptr500 (3,81 13.335) R270 de AK500/2
X2 con-ptr500 (33,02 13.335) R90 de AK500/2













