Paso 12: Salto, Froggie, Hop!
Froggie pobre! Fox inteligente trata de engañarlo en sesión todavía el tiempo suficiente para engullir le para arriba para una comida! Hop, froggie, hop!
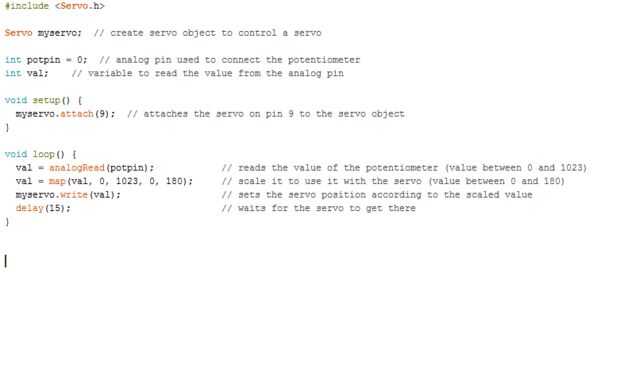
(En todas las medidas/arduino protoboard, se supone que conectar tu arduino a tu portátil vía USB y cargar el bosquejo incluido.)
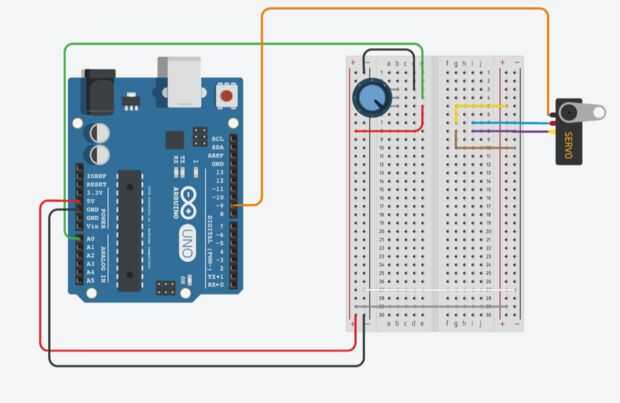
La foto muestra la arduino/placa básica para la combinación motor Servo y potenciómetro. Porque el motor del Servo tiene un cable triple más largo propio, puede poner un cable puente justo en el extremo de cada una de las tres ranuras en el cable de servo motor y caer en los mismos orificios como se muestra en la placa.
En mi configuración de caja/diorama de xerox, el Servo motor cable alcanzó todo el camino a través de la ranura corte, debajo de la base de la tapa de la caja y por debajo del borde delantero de la base. Fue bastante sencillo ejecutar un cable de puente más largo de la ranura de la tierra en el cable a tierra como se indica para el motor en la placa; de la ranura de alimentación sobre el cable del motor servo a la energía que se indica para el motor en la placa y de la tercera ranura para pin 9 en el Arduino.
Para ayudar a froggie saltar fuera de las garras del zorro, coloque la rana para que el centro de su espalda se alinea con el brazo del motor Servo que colocó en el diorama. Utilizar un destornillador para girar el potenciómetro y por lo tanto el brazo del servo para que presiona hacia abajo en espalda de la rana hasta que se desliza desde el fondo y le hace saltar!
(Gracias a Sparkfun y Arduino para hacer su programación abierta a todo el mundo!)









")



")