Paso 6: El algoritmo
El centinela permanece estacionario mientras que el servo pan busca destinos mediante el sensor ultrasónico de largo alcance. Panorámica se presenta de 0 grados (derecha) a 180 grados (izquierdas) y hacia atrás otra vez.
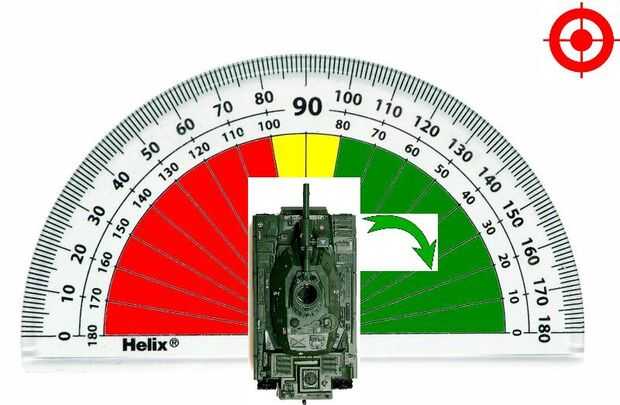
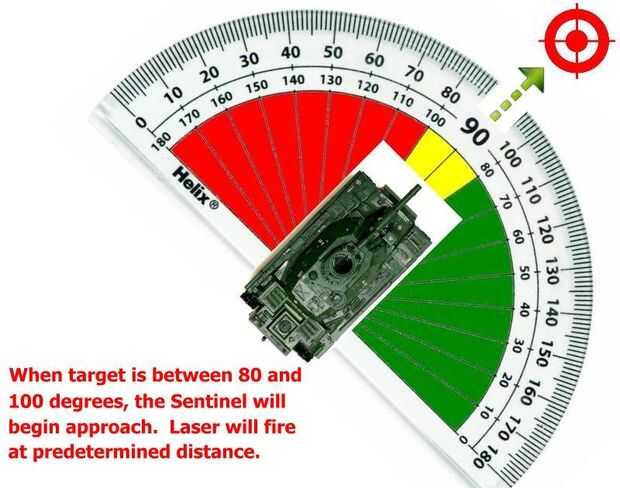
Cuando se detecta un objetivo, los pivotes del vehículo y los recipientes de servo en direcciones opuestas hasta que el objetivo es "directamente a continuación". En el caso de la ilustración proporcionada, se ha detectado un objetivo a 45 grados, por lo que el centinela pivoteará hacia la derecha manteniendo a pan izquierda hasta el ángulo del servo pan muestra el objetivo de estar en algún lugar en el rango de 80 a 100 grados.
En ese momento comienza el enfoque. Si todo va correctamente, se moverá adelante hasta que el compuesto más preciso IR sensor detecta el blanco y trae en para un "kill shot" cuando se haya alcanzado una distancia predeterminada.
Si el objetivo se pierde durante este proceso (que a menudo es debido a la naturaleza imprecisa de sensores baratos), el centinela parar y reanudar la exploración. Una vez que el objetivo se encuentra otra vez, el proceso continúa como antes.
Si el centinela se encuentra muy cerca a la meta, se retirará hasta alcanza una distancia segura.
Un vídeo se proporciona más adelante en este Instructable para demostrar a toda esta acción.





 utilizando un Arduino")


 /w Arduino")

")
")

